Release 260308
This commit is contained in:
0
common/__init__.py
Normal file
0
common/__init__.py
Normal file
46
common/api/__init__.py
Normal file
46
common/api/__init__.py
Normal file
@@ -0,0 +1,46 @@
|
||||
import jwt
|
||||
import os
|
||||
import requests
|
||||
from datetime import datetime, timedelta
|
||||
from openpilot.common.basedir import PERSIST
|
||||
from openpilot.system.version import get_version
|
||||
|
||||
API_HOST = os.getenv('API_HOST', 'https://api.commadotai.com')
|
||||
|
||||
class Api():
|
||||
def __init__(self, dongle_id):
|
||||
self.dongle_id = dongle_id
|
||||
with open(PERSIST+'/comma/id_rsa') as f:
|
||||
self.private_key = f.read()
|
||||
|
||||
def get(self, *args, **kwargs):
|
||||
return self.request('GET', *args, **kwargs)
|
||||
|
||||
def post(self, *args, **kwargs):
|
||||
return self.request('POST', *args, **kwargs)
|
||||
|
||||
def request(self, method, endpoint, timeout=None, access_token=None, **params):
|
||||
return api_get(endpoint, method=method, timeout=timeout, access_token=access_token, **params)
|
||||
|
||||
def get_token(self, expiry_hours=1):
|
||||
now = datetime.utcnow()
|
||||
payload = {
|
||||
'identity': self.dongle_id,
|
||||
'nbf': now,
|
||||
'iat': now,
|
||||
'exp': now + timedelta(hours=expiry_hours)
|
||||
}
|
||||
token = jwt.encode(payload, self.private_key, algorithm='RS256')
|
||||
if isinstance(token, bytes):
|
||||
token = token.decode('utf8')
|
||||
return token
|
||||
|
||||
|
||||
def api_get(endpoint, method='GET', timeout=None, access_token=None, **params):
|
||||
headers = {}
|
||||
if access_token is not None:
|
||||
headers['Authorization'] = "JWT " + access_token
|
||||
|
||||
headers['User-Agent'] = "openpilot-" + get_version()
|
||||
|
||||
return requests.request(method, API_HOST + "/" + endpoint, timeout=timeout, headers=headers, params=params)
|
||||
11
common/basedir.py
Normal file
11
common/basedir.py
Normal file
@@ -0,0 +1,11 @@
|
||||
import os
|
||||
from pathlib import Path
|
||||
|
||||
from openpilot.system.hardware import PC
|
||||
|
||||
BASEDIR = os.path.abspath(os.path.join(os.path.dirname(os.path.realpath(__file__)), "../"))
|
||||
|
||||
if PC:
|
||||
PERSIST = os.path.join(str(Path.home()), ".comma", "persist")
|
||||
else:
|
||||
PERSIST = "/persist"
|
||||
29
common/clutil.h
Normal file
29
common/clutil.h
Normal file
@@ -0,0 +1,29 @@
|
||||
#pragma once
|
||||
|
||||
#ifdef __APPLE__
|
||||
#include <OpenCL/cl.h>
|
||||
#else
|
||||
#include <CL/cl.h>
|
||||
#endif
|
||||
|
||||
#include <string>
|
||||
|
||||
#define CL_CHECK(_expr) \
|
||||
do { \
|
||||
assert(CL_SUCCESS == (_expr)); \
|
||||
} while (0)
|
||||
|
||||
#define CL_CHECK_ERR(_expr) \
|
||||
({ \
|
||||
cl_int err = CL_INVALID_VALUE; \
|
||||
__typeof__(_expr) _ret = _expr; \
|
||||
assert(_ret&& err == CL_SUCCESS); \
|
||||
_ret; \
|
||||
})
|
||||
|
||||
cl_device_id cl_get_device_id(cl_device_type device_type);
|
||||
cl_context cl_create_context(cl_device_id device_id);
|
||||
cl_program cl_program_from_source(cl_context ctx, cl_device_id device_id, const std::string& src, const char* args = nullptr);
|
||||
cl_program cl_program_from_binary(cl_context ctx, cl_device_id device_id, const uint8_t* binary, size_t length, const char* args = nullptr);
|
||||
cl_program cl_program_from_file(cl_context ctx, cl_device_id device_id, const char* path, const char* args);
|
||||
const char* cl_get_error_string(int err);
|
||||
19
common/conversions.py
Normal file
19
common/conversions.py
Normal file
@@ -0,0 +1,19 @@
|
||||
import numpy as np
|
||||
|
||||
class Conversions:
|
||||
# Speed
|
||||
MPH_TO_KPH = 1.609344
|
||||
KPH_TO_MPH = 1. / MPH_TO_KPH
|
||||
MS_TO_KPH = 3.6
|
||||
KPH_TO_MS = 1. / MS_TO_KPH
|
||||
MS_TO_MPH = MS_TO_KPH * KPH_TO_MPH
|
||||
MPH_TO_MS = MPH_TO_KPH * KPH_TO_MS
|
||||
MS_TO_KNOTS = 1.9438
|
||||
KNOTS_TO_MS = 1. / MS_TO_KNOTS
|
||||
|
||||
# Angle
|
||||
DEG_TO_RAD = np.pi / 180.
|
||||
RAD_TO_DEG = 1. / DEG_TO_RAD
|
||||
|
||||
# Mass
|
||||
LB_TO_KG = 0.453592
|
||||
9
common/dict_helpers.py
Normal file
9
common/dict_helpers.py
Normal file
@@ -0,0 +1,9 @@
|
||||
# remove all keys that end in DEPRECATED
|
||||
def strip_deprecated_keys(d):
|
||||
for k in list(d.keys()):
|
||||
if isinstance(k, str):
|
||||
if k.endswith('DEPRECATED'):
|
||||
d.pop(k)
|
||||
elif isinstance(d[k], dict):
|
||||
strip_deprecated_keys(d[k])
|
||||
return d
|
||||
55
common/ffi_wrapper.py
Normal file
55
common/ffi_wrapper.py
Normal file
@@ -0,0 +1,55 @@
|
||||
import os
|
||||
import sys
|
||||
import fcntl
|
||||
import hashlib
|
||||
import platform
|
||||
from cffi import FFI
|
||||
|
||||
def suffix():
|
||||
if platform.system() == "Darwin":
|
||||
return ".dylib"
|
||||
else:
|
||||
return ".so"
|
||||
|
||||
def ffi_wrap(name, c_code, c_header, tmpdir="/tmp/ccache", cflags="", libraries=None):
|
||||
if libraries is None:
|
||||
libraries = []
|
||||
|
||||
cache = name + "_" + hashlib.sha1(c_code.encode('utf-8')).hexdigest()
|
||||
try:
|
||||
os.mkdir(tmpdir)
|
||||
except OSError:
|
||||
pass
|
||||
|
||||
fd = os.open(tmpdir, 0)
|
||||
fcntl.flock(fd, fcntl.LOCK_EX)
|
||||
try:
|
||||
sys.path.append(tmpdir)
|
||||
try:
|
||||
mod = __import__(cache)
|
||||
except Exception:
|
||||
print(f"cache miss {cache}")
|
||||
compile_code(cache, c_code, c_header, tmpdir, cflags, libraries)
|
||||
mod = __import__(cache)
|
||||
finally:
|
||||
os.close(fd)
|
||||
|
||||
return mod.ffi, mod.lib
|
||||
|
||||
|
||||
def compile_code(name, c_code, c_header, directory, cflags="", libraries=None):
|
||||
if libraries is None:
|
||||
libraries = []
|
||||
|
||||
ffibuilder = FFI()
|
||||
ffibuilder.set_source(name, c_code, source_extension='.cpp', libraries=libraries)
|
||||
ffibuilder.cdef(c_header)
|
||||
os.environ['OPT'] = "-fwrapv -O2 -DNDEBUG -std=c++1z"
|
||||
os.environ['CFLAGS'] = cflags
|
||||
ffibuilder.compile(verbose=True, debug=False, tmpdir=directory)
|
||||
|
||||
|
||||
def wrap_compiled(name, directory):
|
||||
sys.path.append(directory)
|
||||
mod = __import__(name)
|
||||
return mod.ffi, mod.lib
|
||||
99
common/file_helpers.py
Normal file
99
common/file_helpers.py
Normal file
@@ -0,0 +1,99 @@
|
||||
import os
|
||||
import shutil
|
||||
import tempfile
|
||||
from atomicwrites import AtomicWriter
|
||||
|
||||
|
||||
def mkdirs_exists_ok(path):
|
||||
if path.startswith(('http://', 'https://')):
|
||||
raise ValueError('URL path')
|
||||
try:
|
||||
os.makedirs(path)
|
||||
except OSError:
|
||||
if not os.path.isdir(path):
|
||||
raise
|
||||
|
||||
|
||||
def rm_not_exists_ok(path):
|
||||
try:
|
||||
os.remove(path)
|
||||
except OSError:
|
||||
if os.path.exists(path):
|
||||
raise
|
||||
|
||||
|
||||
def rm_tree_or_link(path):
|
||||
if os.path.islink(path):
|
||||
os.unlink(path)
|
||||
elif os.path.isdir(path):
|
||||
shutil.rmtree(path)
|
||||
|
||||
|
||||
def get_tmpdir_on_same_filesystem(path):
|
||||
normpath = os.path.normpath(path)
|
||||
parts = normpath.split("/")
|
||||
if len(parts) > 1 and parts[1] == "scratch":
|
||||
return "/scratch/tmp"
|
||||
elif len(parts) > 2 and parts[2] == "runner":
|
||||
return f"/{parts[1]}/runner/tmp"
|
||||
return "/tmp"
|
||||
|
||||
|
||||
class NamedTemporaryDir():
|
||||
def __init__(self, temp_dir=None):
|
||||
self._path = tempfile.mkdtemp(dir=temp_dir)
|
||||
|
||||
@property
|
||||
def name(self):
|
||||
return self._path
|
||||
|
||||
def close(self):
|
||||
shutil.rmtree(self._path)
|
||||
|
||||
def __enter__(self):
|
||||
return self
|
||||
|
||||
def __exit__(self, exc_type, exc_value, traceback):
|
||||
self.close()
|
||||
|
||||
|
||||
class CallbackReader:
|
||||
"""Wraps a file, but overrides the read method to also
|
||||
call a callback function with the number of bytes read so far."""
|
||||
def __init__(self, f, callback, *args):
|
||||
self.f = f
|
||||
self.callback = callback
|
||||
self.cb_args = args
|
||||
self.total_read = 0
|
||||
|
||||
def __getattr__(self, attr):
|
||||
return getattr(self.f, attr)
|
||||
|
||||
def read(self, *args, **kwargs):
|
||||
chunk = self.f.read(*args, **kwargs)
|
||||
self.total_read += len(chunk)
|
||||
self.callback(*self.cb_args, self.total_read)
|
||||
return chunk
|
||||
|
||||
|
||||
def _get_fileobject_func(writer, temp_dir):
|
||||
def _get_fileobject():
|
||||
return writer.get_fileobject(dir=temp_dir)
|
||||
return _get_fileobject
|
||||
|
||||
def atomic_write_on_fs_tmp(path, **kwargs):
|
||||
"""Creates an atomic writer using a temporary file in a temporary directory
|
||||
on the same filesystem as path.
|
||||
"""
|
||||
# TODO(mgraczyk): This use of AtomicWriter relies on implementation details to set the temp
|
||||
# directory.
|
||||
writer = AtomicWriter(path, **kwargs)
|
||||
return writer._open(_get_fileobject_func(writer, get_tmpdir_on_same_filesystem(path)))
|
||||
|
||||
|
||||
def atomic_write_in_dir(path, **kwargs):
|
||||
"""Creates an atomic writer using a temporary file in the same directory
|
||||
as the destination file.
|
||||
"""
|
||||
writer = AtomicWriter(path, **kwargs)
|
||||
return writer._open(_get_fileobject_func(writer, os.path.dirname(path)))
|
||||
18
common/filter_simple.py
Normal file
18
common/filter_simple.py
Normal file
@@ -0,0 +1,18 @@
|
||||
class FirstOrderFilter:
|
||||
# first order filter
|
||||
def __init__(self, x0, rc, dt, initialized=True):
|
||||
self.x = x0
|
||||
self.dt = dt
|
||||
self.update_alpha(rc)
|
||||
self.initialized = initialized
|
||||
|
||||
def update_alpha(self, rc):
|
||||
self.alpha = self.dt / (rc + self.dt)
|
||||
|
||||
def update(self, x):
|
||||
if self.initialized:
|
||||
self.x = (1. - self.alpha) * self.x + self.alpha * x
|
||||
else:
|
||||
self.initialized = True
|
||||
self.x = x
|
||||
return self.x
|
||||
33
common/gpio.h
Normal file
33
common/gpio.h
Normal file
@@ -0,0 +1,33 @@
|
||||
#pragma once
|
||||
|
||||
// Pin definitions
|
||||
#ifdef QCOM2
|
||||
#define GPIO_HUB_RST_N 30
|
||||
#define GPIO_UBLOX_RST_N 32
|
||||
#define GPIO_UBLOX_SAFEBOOT_N 33
|
||||
#define GPIO_UBLOX_PWR_EN 34
|
||||
#define GPIO_STM_RST_N 124
|
||||
#define GPIO_STM_BOOT0 134
|
||||
#define GPIO_BMX_ACCEL_INT 21
|
||||
#define GPIO_BMX_GYRO_INT 23
|
||||
#define GPIO_BMX_MAGN_INT 87
|
||||
#define GPIO_LSM_INT 84
|
||||
#define GPIOCHIP_INT 0
|
||||
#else
|
||||
#define GPIO_HUB_RST_N 0
|
||||
#define GPIO_UBLOX_RST_N 0
|
||||
#define GPIO_UBLOX_SAFEBOOT_N 0
|
||||
#define GPIO_UBLOX_PWR_EN 0
|
||||
#define GPIO_STM_RST_N 0
|
||||
#define GPIO_STM_BOOT0 0
|
||||
#define GPIO_BMX_ACCEL_INT 0
|
||||
#define GPIO_BMX_GYRO_INT 0
|
||||
#define GPIO_BMX_MAGN_INT 0
|
||||
#define GPIO_LSM_INT 0
|
||||
#define GPIOCHIP_INT 0
|
||||
#endif
|
||||
|
||||
int gpio_init(int pin_nr, bool output);
|
||||
int gpio_set(int pin_nr, bool high);
|
||||
|
||||
int gpiochip_get_ro_value_fd(const char* consumer_label, int gpiochiop_id, int pin_nr);
|
||||
55
common/gpio.py
Normal file
55
common/gpio.py
Normal file
@@ -0,0 +1,55 @@
|
||||
import os
|
||||
from functools import lru_cache
|
||||
from typing import Optional, List
|
||||
|
||||
def gpio_init(pin: int, output: bool) -> None:
|
||||
try:
|
||||
with open(f"/sys/class/gpio/gpio{pin}/direction", 'wb') as f:
|
||||
f.write(b"out" if output else b"in")
|
||||
except Exception as e:
|
||||
print(f"Failed to set gpio {pin} direction: {e}")
|
||||
|
||||
def gpio_set(pin: int, high: bool) -> None:
|
||||
try:
|
||||
with open(f"/sys/class/gpio/gpio{pin}/value", 'wb') as f:
|
||||
f.write(b"1" if high else b"0")
|
||||
except Exception as e:
|
||||
print(f"Failed to set gpio {pin} value: {e}")
|
||||
|
||||
def gpio_read(pin: int) -> Optional[bool]:
|
||||
val = None
|
||||
try:
|
||||
with open(f"/sys/class/gpio/gpio{pin}/value", 'rb') as f:
|
||||
val = bool(int(f.read().strip()))
|
||||
except Exception as e:
|
||||
print(f"Failed to set gpio {pin} value: {e}")
|
||||
|
||||
return val
|
||||
|
||||
def gpio_export(pin: int) -> None:
|
||||
if os.path.isdir(f"/sys/class/gpio/gpio{pin}"):
|
||||
return
|
||||
|
||||
try:
|
||||
with open("/sys/class/gpio/export", 'w') as f:
|
||||
f.write(str(pin))
|
||||
except Exception:
|
||||
print(f"Failed to export gpio {pin}")
|
||||
|
||||
@lru_cache(maxsize=None)
|
||||
def get_irq_action(irq: int) -> List[str]:
|
||||
try:
|
||||
with open(f"/sys/kernel/irq/{irq}/actions") as f:
|
||||
actions = f.read().strip().split(',')
|
||||
return actions
|
||||
except FileNotFoundError:
|
||||
return []
|
||||
|
||||
def get_irqs_for_action(action: str) -> List[str]:
|
||||
ret = []
|
||||
with open("/proc/interrupts") as f:
|
||||
for l in f.readlines():
|
||||
irq = l.split(':')[0].strip()
|
||||
if irq.isdigit() and action in get_irq_action(irq):
|
||||
ret.append(irq)
|
||||
return ret
|
||||
55
common/hybrid_modeldata.h
Normal file
55
common/hybrid_modeldata.h
Normal file
@@ -0,0 +1,55 @@
|
||||
#pragma once
|
||||
|
||||
#include <array>
|
||||
#include "common/mat.h"
|
||||
#include "system/hardware/hw.h"
|
||||
|
||||
const int TRAJECTORY_SIZE = 33;
|
||||
const float MIN_DRAW_DISTANCE = 10.0;
|
||||
const float MAX_DRAW_DISTANCE = 100.0;
|
||||
|
||||
template <typename T, size_t size>
|
||||
constexpr std::array<T, size> build_idxs(float max_val) {
|
||||
std::array<T, size> result{};
|
||||
for (int i = 0; i < size; ++i) {
|
||||
result[i] = max_val * ((i / (double)(size - 1)) * (i / (double)(size - 1)));
|
||||
}
|
||||
return result;
|
||||
}
|
||||
|
||||
constexpr auto T_IDXS = build_idxs<double, TRAJECTORY_SIZE>(10.0);
|
||||
constexpr auto T_IDXS_FLOAT = build_idxs<float, TRAJECTORY_SIZE>(10.0);
|
||||
constexpr auto X_IDXS = build_idxs<double, TRAJECTORY_SIZE>(192.0);
|
||||
constexpr auto X_IDXS_FLOAT = build_idxs<float, TRAJECTORY_SIZE>(192.0);
|
||||
|
||||
const int TICI_CAM_WIDTH = 1928;
|
||||
|
||||
namespace tici_dm_crop {
|
||||
const int x_offset = -72;
|
||||
const int y_offset = -144;
|
||||
const int width = 954;
|
||||
};
|
||||
|
||||
const mat3 FCAM_INTRINSIC_MATRIX =
|
||||
Hardware::EON() ? (mat3){{910., 0., 1164.0 / 2,
|
||||
0., 910., 874.0 / 2,
|
||||
0., 0., 1.}}
|
||||
: (mat3){{2648.0, 0.0, 1928.0 / 2,
|
||||
0.0, 2648.0, 1208.0 / 2,
|
||||
0.0, 0.0, 1.0}};
|
||||
|
||||
// tici ecam focal probably wrong? magnification is not consistent across frame
|
||||
// Need to retrain model before this can be changed
|
||||
const mat3 ECAM_INTRINSIC_MATRIX = (mat3){{567.0, 0.0, 1928.0 / 2,
|
||||
0.0, 567.0, 1208.0 / 2,
|
||||
0.0, 0.0, 1.0}};
|
||||
|
||||
static inline mat3 get_model_yuv_transform(bool bayer = true) {
|
||||
float db_s = Hardware::EON() ? 0.5 : 1.0; // debayering does a 2x downscale on EON
|
||||
const mat3 transform = (mat3){{
|
||||
1.0, 0.0, 0.0,
|
||||
0.0, 1.0, 0.0,
|
||||
0.0, 0.0, 1.0
|
||||
}};
|
||||
return bayer ? transform_scale_buffer(transform, db_s) : transform;
|
||||
}
|
||||
27
common/i18n.py
Normal file
27
common/i18n.py
Normal file
@@ -0,0 +1,27 @@
|
||||
import gettext
|
||||
from openpilot.common.params import Params
|
||||
|
||||
locale_dir = "/data/openpilot/selfdrive/assets/locales"
|
||||
# supported_language = ["en-US", "zh-TW", "zh-CN", "ja-JP", "ko-KR"]
|
||||
supported_languages = {
|
||||
"main_en": "en-US",
|
||||
"main_zh-CHT": "zh-TW",
|
||||
"main_zh-CHS": "zh-CN",
|
||||
"main_ko": "ko-KR",
|
||||
"main_ja": "ja-JP",
|
||||
"main_de": "de-DE",
|
||||
"main_pt-BR": "pt_BR",
|
||||
}
|
||||
|
||||
def events():
|
||||
locale = Params().get("LanguageSetting", encoding='utf8')
|
||||
try:
|
||||
if locale is not None:
|
||||
locale = supported_languages[locale.strip()]
|
||||
else:
|
||||
locale = "en-US"
|
||||
except KeyError:
|
||||
locale = "en-US"
|
||||
i18n = gettext.translation("events", localedir=locale_dir, fallback=True, languages=[locale])
|
||||
i18n.install()
|
||||
return i18n.gettext
|
||||
17
common/i2c.h
Normal file
17
common/i2c.h
Normal file
@@ -0,0 +1,17 @@
|
||||
#pragma once
|
||||
|
||||
#include <cstdint>
|
||||
|
||||
#include <sys/types.h>
|
||||
|
||||
class I2CBus {
|
||||
private:
|
||||
int i2c_fd;
|
||||
|
||||
public:
|
||||
I2CBus(uint8_t bus_id);
|
||||
~I2CBus();
|
||||
|
||||
int read_register(uint8_t device_address, uint register_address, uint8_t *buffer, uint8_t len);
|
||||
int set_register(uint8_t device_address, uint register_address, uint8_t data);
|
||||
};
|
||||
0
common/kalman/__init__.py
Normal file
0
common/kalman/__init__.py
Normal file
12
common/kalman/simple_kalman.py
Normal file
12
common/kalman/simple_kalman.py
Normal file
@@ -0,0 +1,12 @@
|
||||
from openpilot.common.kalman.simple_kalman_impl import KF1D as KF1D
|
||||
assert KF1D
|
||||
import numpy as np
|
||||
|
||||
def get_kalman_gain(dt, A, C, Q, R, iterations=100):
|
||||
P = np.zeros_like(Q)
|
||||
for _ in range(iterations):
|
||||
P = A.dot(P).dot(A.T) + dt * Q
|
||||
S = C.dot(P).dot(C.T) + R
|
||||
K = P.dot(C.T).dot(np.linalg.inv(S))
|
||||
P = (np.eye(len(P)) - K.dot(C)).dot(P)
|
||||
return K
|
||||
18
common/kalman/simple_kalman_impl.pxd
Normal file
18
common/kalman/simple_kalman_impl.pxd
Normal file
@@ -0,0 +1,18 @@
|
||||
# cython: language_level = 3
|
||||
|
||||
cdef class KF1D:
|
||||
cdef public:
|
||||
double x0_0
|
||||
double x1_0
|
||||
double K0_0
|
||||
double K1_0
|
||||
double A0_0
|
||||
double A0_1
|
||||
double A1_0
|
||||
double A1_1
|
||||
double C0_0
|
||||
double C0_1
|
||||
double A_K_0
|
||||
double A_K_1
|
||||
double A_K_2
|
||||
double A_K_3
|
||||
37
common/kalman/simple_kalman_impl.pyx
Normal file
37
common/kalman/simple_kalman_impl.pyx
Normal file
@@ -0,0 +1,37 @@
|
||||
# distutils: language = c++
|
||||
# cython: language_level=3
|
||||
|
||||
cdef class KF1D:
|
||||
def __init__(self, x0, A, C, K):
|
||||
self.x0_0 = x0[0][0]
|
||||
self.x1_0 = x0[1][0]
|
||||
self.A0_0 = A[0][0]
|
||||
self.A0_1 = A[0][1]
|
||||
self.A1_0 = A[1][0]
|
||||
self.A1_1 = A[1][1]
|
||||
self.C0_0 = C[0]
|
||||
self.C0_1 = C[1]
|
||||
self.K0_0 = K[0][0]
|
||||
self.K1_0 = K[1][0]
|
||||
|
||||
self.A_K_0 = self.A0_0 - self.K0_0 * self.C0_0
|
||||
self.A_K_1 = self.A0_1 - self.K0_0 * self.C0_1
|
||||
self.A_K_2 = self.A1_0 - self.K1_0 * self.C0_0
|
||||
self.A_K_3 = self.A1_1 - self.K1_0 * self.C0_1
|
||||
|
||||
def update(self, meas):
|
||||
cdef double x0_0 = self.A_K_0 * self.x0_0 + self.A_K_1 * self.x1_0 + self.K0_0 * meas
|
||||
cdef double x1_0 = self.A_K_2 * self.x0_0 + self.A_K_3 * self.x1_0 + self.K1_0 * meas
|
||||
self.x0_0 = x0_0
|
||||
self.x1_0 = x1_0
|
||||
|
||||
return [self.x0_0, self.x1_0]
|
||||
|
||||
@property
|
||||
def x(self):
|
||||
return [[self.x0_0], [self.x1_0]]
|
||||
|
||||
@x.setter
|
||||
def x(self, x):
|
||||
self.x0_0 = x[0][0]
|
||||
self.x1_0 = x[1][0]
|
||||
BIN
common/kalman/simple_kalman_impl.so
Executable file
BIN
common/kalman/simple_kalman_impl.so
Executable file
Binary file not shown.
23
common/kalman/simple_kalman_old.py
Normal file
23
common/kalman/simple_kalman_old.py
Normal file
@@ -0,0 +1,23 @@
|
||||
import numpy as np
|
||||
|
||||
|
||||
class KF1D:
|
||||
# this EKF assumes constant covariance matrix, so calculations are much simpler
|
||||
# the Kalman gain also needs to be precomputed using the control module
|
||||
|
||||
def __init__(self, x0, A, C, K):
|
||||
self.x = x0
|
||||
self.A = A
|
||||
self.C = np.atleast_2d(C)
|
||||
self.K = K
|
||||
|
||||
self.A_K = self.A - np.dot(self.K, self.C)
|
||||
|
||||
# K matrix needs to be pre-computed as follow:
|
||||
# import control
|
||||
# (x, l, K) = control.dare(np.transpose(self.A), np.transpose(self.C), Q, R)
|
||||
# self.K = np.transpose(K)
|
||||
|
||||
def update(self, meas):
|
||||
self.x = np.dot(self.A_K, self.x) + np.dot(self.K, meas)
|
||||
return self.x
|
||||
0
common/kalman/tests/__init__.py
Normal file
0
common/kalman/tests/__init__.py
Normal file
87
common/kalman/tests/test_simple_kalman.py
Normal file
87
common/kalman/tests/test_simple_kalman.py
Normal file
@@ -0,0 +1,87 @@
|
||||
import unittest
|
||||
import random
|
||||
import timeit
|
||||
import numpy as np
|
||||
|
||||
from openpilot.common.kalman.simple_kalman import KF1D
|
||||
from openpilot.common.kalman.simple_kalman_old import KF1D as KF1D_old
|
||||
|
||||
|
||||
class TestSimpleKalman(unittest.TestCase):
|
||||
def setUp(self):
|
||||
dt = 0.01
|
||||
x0_0 = 0.0
|
||||
x1_0 = 0.0
|
||||
A0_0 = 1.0
|
||||
A0_1 = dt
|
||||
A1_0 = 0.0
|
||||
A1_1 = 1.0
|
||||
C0_0 = 1.0
|
||||
C0_1 = 0.0
|
||||
K0_0 = 0.12287673
|
||||
K1_0 = 0.29666309
|
||||
|
||||
self.kf_old = KF1D_old(x0=np.array([[x0_0], [x1_0]]),
|
||||
A=np.array([[A0_0, A0_1], [A1_0, A1_1]]),
|
||||
C=np.array([C0_0, C0_1]),
|
||||
K=np.array([[K0_0], [K1_0]]))
|
||||
|
||||
self.kf = KF1D(x0=[[x0_0], [x1_0]],
|
||||
A=[[A0_0, A0_1], [A1_0, A1_1]],
|
||||
C=[C0_0, C0_1],
|
||||
K=[[K0_0], [K1_0]])
|
||||
|
||||
def test_getter_setter(self):
|
||||
self.kf.x = [[1.0], [1.0]]
|
||||
self.assertEqual(self.kf.x, [[1.0], [1.0]])
|
||||
|
||||
def update_returns_state(self):
|
||||
x = self.kf.update(100)
|
||||
self.assertEqual(x, self.kf.x)
|
||||
|
||||
def test_old_equal_new(self):
|
||||
for _ in range(1000):
|
||||
v_wheel = random.uniform(0, 200)
|
||||
|
||||
x_old = self.kf_old.update(v_wheel)
|
||||
x = self.kf.update(v_wheel)
|
||||
|
||||
# Compare the output x, verify that the error is less than 1e-4
|
||||
np.testing.assert_almost_equal(x_old[0], x[0])
|
||||
np.testing.assert_almost_equal(x_old[1], x[1])
|
||||
|
||||
def test_new_is_faster(self):
|
||||
setup = """
|
||||
import numpy as np
|
||||
|
||||
from openpilot.common.kalman.simple_kalman import KF1D
|
||||
from openpilot.common.kalman.simple_kalman_old import KF1D as KF1D_old
|
||||
|
||||
dt = 0.01
|
||||
x0_0 = 0.0
|
||||
x1_0 = 0.0
|
||||
A0_0 = 1.0
|
||||
A0_1 = dt
|
||||
A1_0 = 0.0
|
||||
A1_1 = 1.0
|
||||
C0_0 = 1.0
|
||||
C0_1 = 0.0
|
||||
K0_0 = 0.12287673
|
||||
K1_0 = 0.29666309
|
||||
|
||||
kf_old = KF1D_old(x0=np.array([[x0_0], [x1_0]]),
|
||||
A=np.array([[A0_0, A0_1], [A1_0, A1_1]]),
|
||||
C=np.array([C0_0, C0_1]),
|
||||
K=np.array([[K0_0], [K1_0]]))
|
||||
|
||||
kf = KF1D(x0=[[x0_0], [x1_0]],
|
||||
A=[[A0_0, A0_1], [A1_0, A1_1]],
|
||||
C=[C0_0, C0_1],
|
||||
K=[[K0_0], [K1_0]])
|
||||
"""
|
||||
kf_speed = timeit.timeit("kf.update(1234)", setup=setup, number=10000)
|
||||
kf_old_speed = timeit.timeit("kf_old.update(1234)", setup=setup, number=10000)
|
||||
self.assertTrue(kf_speed < kf_old_speed / 4)
|
||||
|
||||
if __name__ == "__main__":
|
||||
unittest.main()
|
||||
12
common/lazy_property.py
Normal file
12
common/lazy_property.py
Normal file
@@ -0,0 +1,12 @@
|
||||
class lazy_property():
|
||||
"""Defines a property whose value will be computed only once and as needed.
|
||||
|
||||
This can only be used on instance methods.
|
||||
"""
|
||||
def __init__(self, func):
|
||||
self._func = func
|
||||
|
||||
def __get__(self, obj_self, cls):
|
||||
value = self._func(obj_self)
|
||||
setattr(obj_self, self._func.__name__, value)
|
||||
return value
|
||||
314
common/logging_extra.py
Normal file
314
common/logging_extra.py
Normal file
@@ -0,0 +1,314 @@
|
||||
"""
|
||||
增强日志系统模块,提供以下核心功能:
|
||||
|
||||
类构成:
|
||||
1. SwagLogger - 扩展的标准日志记录器
|
||||
- bind()/bind_global():上下文变量绑定
|
||||
- event():结构化事件记录
|
||||
- ctx():上下文管理器
|
||||
- timestamp():高精度时间戳记录
|
||||
- 支持模块名自动注入
|
||||
- 提供多级别日志方法(info/error/warning/debug)
|
||||
|
||||
2. SwagFormatter - 增强型日志格式化器
|
||||
- 支持上下文变量注入
|
||||
- 异常信息自动格式化
|
||||
- 多数据类型处理(字典/字符串/异常对象)
|
||||
- 统一日志格式:时间 | 级别 | 模块 | 消息
|
||||
|
||||
3. SwaglogRotatingFileHandler - 增强型滚动日志处理器
|
||||
- 自定义日志滚动策略
|
||||
- 支持UTF-8编码
|
||||
- 自动处理日志文件备份
|
||||
|
||||
辅助功能:
|
||||
- JSON安全序列化(json_robust_dumps):支持复杂对象序列化
|
||||
- 线程安全的上下文管理
|
||||
- 日志文件自动清理
|
||||
"""
|
||||
import datetime
|
||||
import os
|
||||
import time # 新增导入
|
||||
import json
|
||||
import logging
|
||||
from threading import local
|
||||
from collections import OrderedDict
|
||||
from logging.handlers import RotatingFileHandler
|
||||
from datetime import timezone
|
||||
|
||||
class SwagLogger(logging.Logger):
|
||||
def __init__(self):
|
||||
logging.Logger.__init__(self, "swaglog")
|
||||
self.global_ctx = {}
|
||||
self.log_local = local()
|
||||
self.log_local.ctx = {}
|
||||
|
||||
def get_ctx(self):
|
||||
if not hasattr(self.log_local, 'ctx'):
|
||||
self.log_local.ctx = {}
|
||||
return {**self.log_local.ctx, **self.global_ctx}
|
||||
|
||||
def bind(self, **kwargs):
|
||||
if not hasattr(self.log_local, 'ctx'):
|
||||
self.log_local.ctx = {}
|
||||
self.log_local.ctx.update(kwargs)
|
||||
|
||||
def bind_global(self, **kwargs):
|
||||
self.global_ctx.update(kwargs)
|
||||
|
||||
def event(self, name, **kwargs):
|
||||
"""记录事件日志"""
|
||||
try:
|
||||
event_data = {"event": name}
|
||||
event_data.update(kwargs)
|
||||
|
||||
if 'error' in kwargs:
|
||||
self.error(event_data)
|
||||
else:
|
||||
self.info(event_data)
|
||||
except Exception as e:
|
||||
self.error(f"Failed to log event {name}: {str(e)}")
|
||||
|
||||
def ctx(self):
|
||||
from contextlib import contextmanager
|
||||
import copy
|
||||
|
||||
@contextmanager
|
||||
def _ctx():
|
||||
old_ctx = getattr(self.log_local, 'ctx', {})
|
||||
self.log_local.ctx = copy.copy(old_ctx) or {}
|
||||
try:
|
||||
yield
|
||||
finally:
|
||||
self.log_local.ctx = old_ctx
|
||||
return _ctx()
|
||||
|
||||
def timestamp(self, event_name):
|
||||
if "LOG_TIMESTAMPS" in os.environ:
|
||||
t = time.monotonic()
|
||||
tstp = {"timestamp": {"event": event_name, "time": t*1e9}}
|
||||
self.debug(tstp)
|
||||
|
||||
def _log(self, level, msg, args, exc_info=None, extra=None, stack_info=False,
|
||||
stacklevel=1, module_name=None):
|
||||
if module_name:
|
||||
self.bind(module=module_name)
|
||||
|
||||
if isinstance(msg, str) and module_name:
|
||||
msg_dict = {
|
||||
"msg": msg,
|
||||
"module": module_name
|
||||
}
|
||||
msg = msg_dict
|
||||
args = ()
|
||||
|
||||
return super()._log(level, msg, args, exc_info, extra, stack_info, stacklevel)
|
||||
|
||||
def info(self, msg, *args, **kwargs):
|
||||
return self._log(logging.INFO, msg, args, **kwargs)
|
||||
|
||||
def error(self, msg, *args, **kwargs):
|
||||
return self._log(logging.ERROR, msg, args, **kwargs)
|
||||
|
||||
def warning(self, msg, *args, **kwargs):
|
||||
return self._log(logging.WARNING, msg, args, **kwargs)
|
||||
|
||||
def debug(self, msg, *args, **kwargs):
|
||||
return self._log(logging.DEBUG, msg, args, **kwargs)
|
||||
|
||||
class SwagFormatter(logging.Formatter):
|
||||
def __init__(self, swaglogger=None):
|
||||
super().__init__()
|
||||
self.swaglogger = swaglogger
|
||||
|
||||
def format(self, record):
|
||||
try:
|
||||
# 简化消息处理逻辑
|
||||
if isinstance(record.msg, dict):
|
||||
msg = record.msg
|
||||
else:
|
||||
msg = {'msg': str(record.msg)}
|
||||
|
||||
# 只在必要时合并上下文
|
||||
if self.swaglogger:
|
||||
ctx = self.swaglogger.get_ctx()
|
||||
if ctx and isinstance(msg, dict):
|
||||
msg = {**ctx, **msg}
|
||||
|
||||
# 提取消息内容
|
||||
msg_content = msg.get('msg', str(msg))
|
||||
record.msg = msg_content
|
||||
record.raw_msg = msg
|
||||
|
||||
# 简化时间戳格式化
|
||||
current_time = time.localtime()
|
||||
microsecond = int(time.time() * 1000) % 1000
|
||||
timestamp = f"{time.strftime('%Y-%m-%d %H:%M:%S', current_time)}.{microsecond:03d}"
|
||||
level_name = logging.getLevelName(record.levelno)
|
||||
module = getattr(record, 'module', 'unknown')
|
||||
return f"{timestamp} | {level_name} | {module} | {msg_content}"
|
||||
except Exception as e:
|
||||
return f"FormatterError: {str(e)}"
|
||||
|
||||
|
||||
class SwaglogRotatingFileHandler(RotatingFileHandler):
|
||||
def __init__(self, filename, max_bytes=0, backup_count=0, interval=None, encoding='utf8', startup_time=None):
|
||||
super().__init__(
|
||||
filename,
|
||||
mode='a',
|
||||
maxBytes=max_bytes,
|
||||
backupCount=backup_count,
|
||||
encoding=encoding,
|
||||
delay=True
|
||||
)
|
||||
self.interval = interval
|
||||
self.last_rollover = time.time()
|
||||
self.process_count = 0
|
||||
self.startup_time = startup_time or time.strftime("%Y%m%d_%H%M%S")
|
||||
|
||||
# 解析基础文件名
|
||||
base_name = os.path.basename(filename)
|
||||
parts = base_name.split('.')
|
||||
self.base_name = parts[0]
|
||||
self.hex_ts = parts[1] if len(parts) > 1 else ''
|
||||
self.rollover_count = 0
|
||||
|
||||
def get_next_filename(self):
|
||||
"""生成下一个日志文件名"""
|
||||
timestamp = time.strftime("%Y%m%d_%H%M%S")
|
||||
return os.path.join(
|
||||
os.path.dirname(self.baseFilename),
|
||||
f"{self.base_name}.{self.hex_ts}.{timestamp}.{self.rollover_count:03d}.log"
|
||||
)
|
||||
|
||||
def rotation_filename(self, default_name):
|
||||
"""重写文件名生成方法"""
|
||||
return self.get_next_filename()
|
||||
|
||||
def doRollover(self):
|
||||
"""执行日志滚动"""
|
||||
if self.stream:
|
||||
self.stream.close()
|
||||
self.stream = None
|
||||
|
||||
next_name = self.get_next_filename()
|
||||
while os.path.exists(next_name) and self.rollover_count < 1000:
|
||||
self.rollover_count += 1
|
||||
next_name = self.get_next_filename()
|
||||
|
||||
if self.rollover_count >= 1000:
|
||||
raise RuntimeError("Rollover count exceeded maximum limit")
|
||||
|
||||
self.baseFilename = next_name
|
||||
self.rollover_count += 1
|
||||
self.last_rollover = time.time()
|
||||
self.stream = self._open()
|
||||
|
||||
|
||||
class CustomSwaglogRotatingFileHandler(SwaglogRotatingFileHandler):
|
||||
def __init__(self, filename, max_bytes=0, backup_count=0, interval=None, encoding='utf8'):
|
||||
super().__init__(filename, max_bytes, backup_count, interval, encoding)
|
||||
self.process_count = 0
|
||||
base_name = os.path.basename(filename)
|
||||
parts = base_name.split('.')
|
||||
self.base_name = parts[0]
|
||||
self.hex_ts = parts[1] if len(parts) > 1 else hex(int(time.time()))[2:]
|
||||
self.rollover_count = 0
|
||||
self.current_size = 0
|
||||
self.has_content = False
|
||||
self._pending_file = None
|
||||
self.stream = None # 初始化时不创建文件
|
||||
|
||||
def _get_next_filename(self):
|
||||
"""生成下一个日志文件名"""
|
||||
timestamp = time.strftime("%Y%m%d_%H%M%S")
|
||||
next_filename = os.path.join(
|
||||
os.path.dirname(self.baseFilename),
|
||||
f"{self.base_name}.{self.hex_ts}.{timestamp}.{self.rollover_count:03d}.log"
|
||||
)
|
||||
|
||||
while os.path.exists(next_filename) and self.rollover_count < 1000:
|
||||
self.rollover_count += 1
|
||||
next_filename = os.path.join(
|
||||
os.path.dirname(self.baseFilename),
|
||||
f"{self.base_name}.{self.hex_ts}.{timestamp}.{self.rollover_count:03d}.log"
|
||||
)
|
||||
|
||||
if self.rollover_count >= 1000:
|
||||
raise RuntimeError("Rollover count exceeded maximum limit")
|
||||
|
||||
return next_filename
|
||||
|
||||
def shouldRollover(self, record):
|
||||
"""检查是否应该滚动日志文件"""
|
||||
if not self.has_content:
|
||||
return False
|
||||
|
||||
if self.stream is None: # 如果文件未创建,不需要滚动
|
||||
return False
|
||||
|
||||
size_exceeded = self.maxBytes > 0 and self.current_size >= self.maxBytes
|
||||
time_exceeded = self.interval and time.time() - self.last_rollover >= self.interval
|
||||
return size_exceeded or time_exceeded
|
||||
|
||||
def emit(self, record):
|
||||
"""确保只写入有效内容"""
|
||||
if record and record.msg:
|
||||
msg = self.format(record)
|
||||
if msg:
|
||||
try:
|
||||
# 第一次写入时才创建文件
|
||||
if self.stream is None:
|
||||
self._pending_file = self._get_next_filename()
|
||||
self.stream = open(self._pending_file, self.mode, encoding=self.encoding)
|
||||
self.baseFilename = self._pending_file
|
||||
self.last_rollover = time.time()
|
||||
|
||||
self.stream.write(msg + '\n')
|
||||
self.stream.flush()
|
||||
self.current_size += len(msg) + 1
|
||||
self.has_content = True
|
||||
self.process_count += 1
|
||||
|
||||
# 使用 shouldRollover 判断是否需要滚动
|
||||
if self.shouldRollover(record):
|
||||
self.doRollover()
|
||||
except Exception as e:
|
||||
self.handleError(record)
|
||||
|
||||
def doRollover(self):
|
||||
if not self.has_content: # 如果当前文件没有内容,不执行滚动
|
||||
return
|
||||
|
||||
if self.stream:
|
||||
self.stream.close()
|
||||
self.stream = None
|
||||
|
||||
self._pending_file = self._get_next_filename()
|
||||
self.rollover_count += 1
|
||||
self.current_size = 0
|
||||
self.has_content = False
|
||||
|
||||
def json_robust_dumps(obj):
|
||||
"""增强型JSON序列化"""
|
||||
def handler(o): # ✅ 修正内部函数参数名冲突问题
|
||||
if isinstance(o, (datetime.datetime, datetime.date)): # 参数重命名为 o
|
||||
return o.isoformat()
|
||||
if hasattr(o, '__dict__'):
|
||||
return vars(o)
|
||||
return repr(o)
|
||||
return json.dumps(obj, default=handler, ensure_ascii=False)
|
||||
|
||||
class NiceOrderedDict(OrderedDict):
|
||||
def __str__(self):
|
||||
return json_robust_dumps(self)
|
||||
|
||||
if __name__ == "__main__":
|
||||
log = SwagLogger()
|
||||
console = logging.StreamHandler()
|
||||
console.setFormatter(SwagFormatter(log))
|
||||
log.addHandler(console)
|
||||
log.info("测试日志")
|
||||
log.bind(module="test")
|
||||
log.info("带模块的测试日志")
|
||||
log.error("错误日志测试")
|
||||
85
common/mat.h
Normal file
85
common/mat.h
Normal file
@@ -0,0 +1,85 @@
|
||||
#pragma once
|
||||
|
||||
typedef struct vec3 {
|
||||
float v[3];
|
||||
} vec3;
|
||||
|
||||
typedef struct vec4 {
|
||||
float v[4];
|
||||
} vec4;
|
||||
|
||||
typedef struct mat3 {
|
||||
float v[3*3];
|
||||
} mat3;
|
||||
|
||||
typedef struct mat4 {
|
||||
float v[4*4];
|
||||
} mat4;
|
||||
|
||||
static inline mat3 matmul3(const mat3 &a, const mat3 &b) {
|
||||
mat3 ret = {{0.0}};
|
||||
for (int r=0; r<3; r++) {
|
||||
for (int c=0; c<3; c++) {
|
||||
float v = 0.0;
|
||||
for (int k=0; k<3; k++) {
|
||||
v += a.v[r*3+k] * b.v[k*3+c];
|
||||
}
|
||||
ret.v[r*3+c] = v;
|
||||
}
|
||||
}
|
||||
return ret;
|
||||
}
|
||||
|
||||
static inline vec3 matvecmul3(const mat3 &a, const vec3 &b) {
|
||||
vec3 ret = {{0.0}};
|
||||
for (int r=0; r<3; r++) {
|
||||
for (int c=0; c<3; c++) {
|
||||
ret.v[r] += a.v[r*3+c] * b.v[c];
|
||||
}
|
||||
}
|
||||
return ret;
|
||||
}
|
||||
|
||||
static inline mat4 matmul(const mat4 &a, const mat4 &b) {
|
||||
mat4 ret = {{0.0}};
|
||||
for (int r=0; r<4; r++) {
|
||||
for (int c=0; c<4; c++) {
|
||||
float v = 0.0;
|
||||
for (int k=0; k<4; k++) {
|
||||
v += a.v[r*4+k] * b.v[k*4+c];
|
||||
}
|
||||
ret.v[r*4+c] = v;
|
||||
}
|
||||
}
|
||||
return ret;
|
||||
}
|
||||
|
||||
static inline vec4 matvecmul(const mat4 &a, const vec4 &b) {
|
||||
vec4 ret = {{0.0}};
|
||||
for (int r=0; r<4; r++) {
|
||||
for (int c=0; c<4; c++) {
|
||||
ret.v[r] += a.v[r*4+c] * b.v[c];
|
||||
}
|
||||
}
|
||||
return ret;
|
||||
}
|
||||
|
||||
// scales the input and output space of a transformation matrix
|
||||
// that assumes pixel-center origin.
|
||||
static inline mat3 transform_scale_buffer(const mat3 &in, float s) {
|
||||
// in_pt = ( transform(out_pt/s + 0.5) - 0.5) * s
|
||||
|
||||
mat3 transform_out = {{
|
||||
1.0f/s, 0.0f, 0.5f,
|
||||
0.0f, 1.0f/s, 0.5f,
|
||||
0.0f, 0.0f, 1.0f,
|
||||
}};
|
||||
|
||||
mat3 transform_in = {{
|
||||
s, 0.0f, -0.5f*s,
|
||||
0.0f, s, -0.5f*s,
|
||||
0.0f, 0.0f, 1.0f,
|
||||
}};
|
||||
|
||||
return matmul3(transform_in, matmul3(in, transform_out));
|
||||
}
|
||||
38
common/modeldata.h
Normal file
38
common/modeldata.h
Normal file
@@ -0,0 +1,38 @@
|
||||
#pragma once
|
||||
|
||||
#include <array>
|
||||
#include "common/mat.h"
|
||||
#include "system/hardware/hw.h"
|
||||
|
||||
const int TRAJECTORY_SIZE = 33;
|
||||
const int LAT_MPC_N = 16;
|
||||
const int LON_MPC_N = 32;
|
||||
const float MIN_DRAW_DISTANCE = 10.0;
|
||||
const float MAX_DRAW_DISTANCE = 100.0;
|
||||
|
||||
const float RYG_GREEN = 0.01165;
|
||||
const float RYG_YELLOW = 0.06157;
|
||||
|
||||
template <typename T, size_t size>
|
||||
constexpr std::array<T, size> build_idxs(float max_val) {
|
||||
std::array<T, size> result{};
|
||||
for (int i = 0; i < size; ++i) {
|
||||
result[i] = max_val * ((i / (double)(size - 1)) * (i / (double)(size - 1)));
|
||||
}
|
||||
return result;
|
||||
}
|
||||
|
||||
constexpr auto T_IDXS = build_idxs<double, TRAJECTORY_SIZE>(10.0);
|
||||
constexpr auto T_IDXS_FLOAT = build_idxs<float, TRAJECTORY_SIZE>(10.0);
|
||||
constexpr auto X_IDXS = build_idxs<double, TRAJECTORY_SIZE>(192.0);
|
||||
constexpr auto X_IDXS_FLOAT = build_idxs<float, TRAJECTORY_SIZE>(192.0);
|
||||
|
||||
const mat3 FCAM_INTRINSIC_MATRIX = (mat3){{2648.0, 0.0, 1928.0 / 2,
|
||||
0.0, 2648.0, 1208.0 / 2,
|
||||
0.0, 0.0, 1.0}};
|
||||
|
||||
// tici ecam focal probably wrong? magnification is not consistent across frame
|
||||
// Need to retrain model before this can be changed
|
||||
const mat3 ECAM_INTRINSIC_MATRIX = (mat3){{567.0, 0.0, 1928.0 / 2,
|
||||
0.0, 567.0, 1208.0 / 2,
|
||||
0.0, 0.0, 1.0}};
|
||||
19
common/numpy_fast.py
Normal file
19
common/numpy_fast.py
Normal file
@@ -0,0 +1,19 @@
|
||||
def clip(x, lo, hi):
|
||||
return max(lo, min(hi, x))
|
||||
|
||||
def interp(x, xp, fp):
|
||||
N = len(xp)
|
||||
|
||||
def get_interp(xv):
|
||||
hi = 0
|
||||
while hi < N and xv > xp[hi]:
|
||||
hi += 1
|
||||
low = hi - 1
|
||||
return fp[-1] if hi == N and xv > xp[low] else (
|
||||
fp[0] if hi == 0 else
|
||||
(xv - xp[low]) * (fp[hi] - fp[low]) / (xp[hi] - xp[low]) + fp[low])
|
||||
|
||||
return [get_interp(v) for v in x] if hasattr(x, '__iter__') else get_interp(x)
|
||||
|
||||
def mean(x):
|
||||
return sum(x) / len(x)
|
||||
22
common/numpy_helpers.py
Normal file
22
common/numpy_helpers.py
Normal file
@@ -0,0 +1,22 @@
|
||||
import numpy as np
|
||||
|
||||
|
||||
def deep_interp_np(x, xp, fp, axis=None):
|
||||
if axis is not None:
|
||||
fp = fp.swapaxes(0,axis)
|
||||
x = np.atleast_1d(x)
|
||||
xp = np.array(xp)
|
||||
if len(xp) < 2:
|
||||
return np.repeat(fp, len(x), axis=0)
|
||||
if min(np.diff(xp)) < 0:
|
||||
raise RuntimeError('Bad x array for interpolation')
|
||||
j = np.searchsorted(xp, x) - 1
|
||||
j = np.clip(j, 0, len(xp)-2)
|
||||
d = np.divide(x - xp[j], xp[j + 1] - xp[j], out=np.ones_like(x, dtype=np.float64), where=xp[j + 1] - xp[j] != 0)
|
||||
vals_interp = (fp[j].T*(1 - d)).T + (fp[j + 1].T*d).T
|
||||
if axis is not None:
|
||||
vals_interp = vals_interp.swapaxes(0,axis)
|
||||
if len(vals_interp) == 1:
|
||||
return vals_interp[0]
|
||||
else:
|
||||
return vals_interp
|
||||
64
common/params.h
Normal file
64
common/params.h
Normal file
@@ -0,0 +1,64 @@
|
||||
#pragma once
|
||||
|
||||
#include <future>
|
||||
#include <map>
|
||||
#include <string>
|
||||
#include <tuple>
|
||||
#include <utility>
|
||||
#include <vector>
|
||||
|
||||
#include "common/queue.h"
|
||||
|
||||
enum ParamKeyType {
|
||||
PERSISTENT = 0x02,
|
||||
CLEAR_ON_MANAGER_START = 0x04,
|
||||
CLEAR_ON_ONROAD_TRANSITION = 0x08,
|
||||
CLEAR_ON_OFFROAD_TRANSITION = 0x10,
|
||||
DONT_LOG = 0x20,
|
||||
ALL = 0xFFFFFFFF
|
||||
};
|
||||
|
||||
class Params {
|
||||
public:
|
||||
Params(const std::string &path = {});
|
||||
std::vector<std::string> allKeys() const;
|
||||
bool checkKey(const std::string &key);
|
||||
ParamKeyType getKeyType(const std::string &key);
|
||||
inline std::string getParamPath(const std::string &key = {}) {
|
||||
return params_path + params_prefix + (key.empty() ? "" : "/" + key);
|
||||
}
|
||||
|
||||
// Delete a value
|
||||
int remove(const std::string &key);
|
||||
void clearAll(ParamKeyType type);
|
||||
|
||||
// helpers for reading values
|
||||
std::string get(const std::string &key, bool block = false);
|
||||
inline bool getBool(const std::string &key, bool block = false) {
|
||||
return get(key, block) == "1";
|
||||
}
|
||||
std::map<std::string, std::string> readAll();
|
||||
|
||||
// helpers for writing values
|
||||
int put(const char *key, const char *val, size_t value_size);
|
||||
inline int put(const std::string &key, const std::string &val) {
|
||||
return put(key.c_str(), val.data(), val.size());
|
||||
}
|
||||
inline int putBool(const std::string &key, bool val) {
|
||||
return put(key.c_str(), val ? "1" : "0", 1);
|
||||
}
|
||||
void putNonBlocking(const std::string &key, const std::string &val);
|
||||
inline void putBoolNonBlocking(const std::string &key, bool val) {
|
||||
putNonBlocking(key, val ? "1" : "0");
|
||||
}
|
||||
|
||||
private:
|
||||
void asyncWriteThread();
|
||||
|
||||
std::string params_path;
|
||||
std::string params_prefix;
|
||||
|
||||
// for nonblocking write
|
||||
std::future<void> future;
|
||||
SafeQueue<std::pair<std::string, std::string>> queue;
|
||||
};
|
||||
18
common/params.py
Normal file
18
common/params.py
Normal file
@@ -0,0 +1,18 @@
|
||||
from openpilot.common.params_pyx import Params, ParamKeyType, UnknownKeyName
|
||||
assert Params
|
||||
assert ParamKeyType
|
||||
assert UnknownKeyName
|
||||
|
||||
if __name__ == "__main__":
|
||||
import sys
|
||||
|
||||
params = Params()
|
||||
key = sys.argv[1]
|
||||
assert params.check_key(key), f"unknown param: {key}"
|
||||
|
||||
if len(sys.argv) == 3:
|
||||
val = sys.argv[2]
|
||||
print(f"SET: {key} = {val}")
|
||||
params.put(key, val)
|
||||
elif len(sys.argv) == 2:
|
||||
print(f"GET: {key} = {params.get(key)}")
|
||||
118
common/params_pyx.pyx
Executable file
118
common/params_pyx.pyx
Executable file
@@ -0,0 +1,118 @@
|
||||
# distutils: language = c++
|
||||
# cython: language_level = 3
|
||||
from libcpp cimport bool
|
||||
from libcpp.string cimport string
|
||||
from libcpp.vector cimport vector
|
||||
import threading
|
||||
|
||||
cdef extern from "common/params.h":
|
||||
cpdef enum ParamKeyType:
|
||||
PERSISTENT
|
||||
CLEAR_ON_MANAGER_START
|
||||
CLEAR_ON_ONROAD_TRANSITION
|
||||
CLEAR_ON_OFFROAD_TRANSITION
|
||||
ALL
|
||||
|
||||
cdef cppclass c_Params "Params":
|
||||
c_Params(string) nogil
|
||||
string get(string, bool) nogil
|
||||
bool getBool(string, bool) nogil
|
||||
int remove(string) nogil
|
||||
int put(string, string) nogil
|
||||
void putNonBlocking(string, string) nogil
|
||||
void putBoolNonBlocking(string, bool) nogil
|
||||
int putBool(string, bool) nogil
|
||||
bool checkKey(string) nogil
|
||||
string getParamPath(string) nogil
|
||||
void clearAll(ParamKeyType)
|
||||
vector[string] allKeys()
|
||||
|
||||
|
||||
def ensure_bytes(v):
|
||||
return v.encode() if isinstance(v, str) else v
|
||||
|
||||
class UnknownKeyName(Exception):
|
||||
pass
|
||||
|
||||
cdef class Params:
|
||||
cdef c_Params* p
|
||||
|
||||
def __cinit__(self, d=""):
|
||||
cdef string path = <string>d.encode()
|
||||
with nogil:
|
||||
self.p = new c_Params(path)
|
||||
|
||||
def __dealloc__(self):
|
||||
del self.p
|
||||
|
||||
def clear_all(self, tx_type=ParamKeyType.ALL):
|
||||
self.p.clearAll(tx_type)
|
||||
|
||||
def check_key(self, key):
|
||||
key = ensure_bytes(key)
|
||||
if not self.p.checkKey(key):
|
||||
raise UnknownKeyName(key)
|
||||
return key
|
||||
|
||||
def get(self, key, bool block=False, encoding=None):
|
||||
cdef string k = self.check_key(key)
|
||||
cdef string val
|
||||
with nogil:
|
||||
val = self.p.get(k, block)
|
||||
|
||||
if val == b"":
|
||||
if block:
|
||||
# If we got no value while running in blocked mode
|
||||
# it means we got an interrupt while waiting
|
||||
raise KeyboardInterrupt
|
||||
else:
|
||||
return None
|
||||
|
||||
return val if encoding is None else val.decode(encoding)
|
||||
|
||||
def get_bool(self, key, bool block=False):
|
||||
cdef string k = self.check_key(key)
|
||||
cdef bool r
|
||||
with nogil:
|
||||
r = self.p.getBool(k, block)
|
||||
return r
|
||||
|
||||
def put(self, key, dat):
|
||||
"""
|
||||
Warning: This function blocks until the param is written to disk!
|
||||
In very rare cases this can take over a second, and your code will hang.
|
||||
Use the put_nonblocking, put_bool_nonblocking in time sensitive code, but
|
||||
in general try to avoid writing params as much as possible.
|
||||
"""
|
||||
cdef string k = self.check_key(key)
|
||||
cdef string dat_bytes = ensure_bytes(dat)
|
||||
with nogil:
|
||||
self.p.put(k, dat_bytes)
|
||||
|
||||
def put_bool(self, key, bool val):
|
||||
cdef string k = self.check_key(key)
|
||||
with nogil:
|
||||
self.p.putBool(k, val)
|
||||
|
||||
def put_nonblocking(self, key, dat):
|
||||
cdef string k = self.check_key(key)
|
||||
cdef string dat_bytes = ensure_bytes(dat)
|
||||
with nogil:
|
||||
self.p.putNonBlocking(k, dat_bytes)
|
||||
|
||||
def put_bool_nonblocking(self, key, bool val):
|
||||
cdef string k = self.check_key(key)
|
||||
with nogil:
|
||||
self.p.putBoolNonBlocking(k, val)
|
||||
|
||||
def remove(self, key):
|
||||
cdef string k = self.check_key(key)
|
||||
with nogil:
|
||||
self.p.remove(k)
|
||||
|
||||
def get_param_path(self, key=""):
|
||||
cdef string key_bytes = ensure_bytes(key)
|
||||
return self.p.getParamPath(key_bytes).decode("utf-8")
|
||||
|
||||
def all_keys(self):
|
||||
return self.p.allKeys()
|
||||
BIN
common/params_pyx.so
Executable file
BIN
common/params_pyx.so
Executable file
Binary file not shown.
34
common/prefix.h
Normal file
34
common/prefix.h
Normal file
@@ -0,0 +1,34 @@
|
||||
#pragma once
|
||||
|
||||
#include <cassert>
|
||||
#include <string>
|
||||
|
||||
#include "common/params.h"
|
||||
#include "common/util.h"
|
||||
|
||||
class OpenpilotPrefix {
|
||||
public:
|
||||
OpenpilotPrefix(std::string prefix = {}) {
|
||||
if (prefix.empty()) {
|
||||
prefix = util::random_string(15);
|
||||
}
|
||||
msgq_path = "/dev/shm/" + prefix;
|
||||
bool ret = util::create_directories(msgq_path, 0777);
|
||||
assert(ret);
|
||||
setenv("OPENPILOT_PREFIX", prefix.c_str(), 1);
|
||||
}
|
||||
|
||||
~OpenpilotPrefix() {
|
||||
auto param_path = Params().getParamPath();
|
||||
if (util::file_exists(param_path)) {
|
||||
std::string real_path = util::readlink(param_path);
|
||||
system(util::string_format("rm %s -rf", real_path.c_str()).c_str());
|
||||
unlink(param_path.c_str());
|
||||
}
|
||||
system(util::string_format("rm %s -rf", msgq_path.c_str()).c_str());
|
||||
unsetenv("OPENPILOT_PREFIX");
|
||||
}
|
||||
|
||||
private:
|
||||
std::string msgq_path;
|
||||
};
|
||||
45
common/profiler.py
Normal file
45
common/profiler.py
Normal file
@@ -0,0 +1,45 @@
|
||||
import time
|
||||
|
||||
class Profiler():
|
||||
def __init__(self, enabled=False):
|
||||
self.enabled = enabled
|
||||
self.cp = {}
|
||||
self.cp_ignored = []
|
||||
self.iter = 0
|
||||
self.start_time = time.time()
|
||||
self.last_time = self.start_time
|
||||
self.tot = 0.
|
||||
|
||||
def reset(self, enabled=False):
|
||||
self.enabled = enabled
|
||||
self.cp = {}
|
||||
self.cp_ignored = []
|
||||
self.iter = 0
|
||||
self.start_time = time.time()
|
||||
self.last_time = self.start_time
|
||||
|
||||
def checkpoint(self, name, ignore=False):
|
||||
# ignore flag needed when benchmarking threads with ratekeeper
|
||||
if not self.enabled:
|
||||
return
|
||||
tt = time.time()
|
||||
if name not in self.cp:
|
||||
self.cp[name] = 0.
|
||||
if ignore:
|
||||
self.cp_ignored.append(name)
|
||||
self.cp[name] += tt - self.last_time
|
||||
if not ignore:
|
||||
self.tot += tt - self.last_time
|
||||
self.last_time = tt
|
||||
|
||||
def display(self):
|
||||
if not self.enabled:
|
||||
return
|
||||
self.iter += 1
|
||||
print("******* Profiling %d *******" % self.iter)
|
||||
for n, ms in sorted(self.cp.items(), key=lambda x: -x[1]):
|
||||
if n in self.cp_ignored:
|
||||
print("%30s: %9.2f avg: %7.2f percent: %3.0f IGNORED" % (n, ms*1000.0, ms*1000.0/self.iter, ms/self.tot*100))
|
||||
else:
|
||||
print("%30s: %9.2f avg: %7.2f percent: %3.0f" % (n, ms*1000.0, ms*1000.0/self.iter, ms/self.tot*100))
|
||||
print(f"Iter clock: {self.tot / self.iter:2.6f} TOTAL: {self.tot:2.2f}")
|
||||
52
common/queue.h
Normal file
52
common/queue.h
Normal file
@@ -0,0 +1,52 @@
|
||||
#pragma once
|
||||
|
||||
#include <condition_variable>
|
||||
#include <mutex>
|
||||
#include <queue>
|
||||
|
||||
template <class T>
|
||||
class SafeQueue {
|
||||
public:
|
||||
SafeQueue() = default;
|
||||
|
||||
void push(const T& v) {
|
||||
{
|
||||
std::unique_lock lk(m);
|
||||
q.push(v);
|
||||
}
|
||||
cv.notify_one();
|
||||
}
|
||||
|
||||
T pop() {
|
||||
std::unique_lock lk(m);
|
||||
cv.wait(lk, [this] { return !q.empty(); });
|
||||
T v = q.front();
|
||||
q.pop();
|
||||
return v;
|
||||
}
|
||||
|
||||
bool try_pop(T& v, int timeout_ms = 0) {
|
||||
std::unique_lock lk(m);
|
||||
if (!cv.wait_for(lk, std::chrono::milliseconds(timeout_ms), [this] { return !q.empty(); })) {
|
||||
return false;
|
||||
}
|
||||
v = q.front();
|
||||
q.pop();
|
||||
return true;
|
||||
}
|
||||
|
||||
bool empty() const {
|
||||
std::scoped_lock lk(m);
|
||||
return q.empty();
|
||||
}
|
||||
|
||||
size_t size() const {
|
||||
std::scoped_lock lk(m);
|
||||
return q.size();
|
||||
}
|
||||
|
||||
private:
|
||||
mutable std::mutex m;
|
||||
std::condition_variable cv;
|
||||
std::queue<T> q;
|
||||
};
|
||||
23
common/ratekeeper.h
Normal file
23
common/ratekeeper.h
Normal file
@@ -0,0 +1,23 @@
|
||||
#pragma once
|
||||
|
||||
#include <cstdint>
|
||||
#include <string>
|
||||
|
||||
class RateKeeper {
|
||||
public:
|
||||
RateKeeper(const std::string &name, float rate, float print_delay_threshold = 0);
|
||||
~RateKeeper() {}
|
||||
bool keepTime();
|
||||
bool monitorTime();
|
||||
inline double frame() const { return frame_; }
|
||||
inline double remaining() const { return remaining_; }
|
||||
|
||||
private:
|
||||
double interval;
|
||||
double next_frame_time;
|
||||
double last_monitor_time;
|
||||
double remaining_ = 0;
|
||||
float print_delay_threshold = 0;
|
||||
uint64_t frame_ = 0;
|
||||
std::string name;
|
||||
};
|
||||
98
common/realtime.py
Normal file
98
common/realtime.py
Normal file
@@ -0,0 +1,98 @@
|
||||
"""Utilities for reading real time clocks and keeping soft real time constraints."""
|
||||
import gc
|
||||
import os
|
||||
import time
|
||||
from collections import deque
|
||||
from typing import Optional, List, Union
|
||||
|
||||
from setproctitle import getproctitle
|
||||
|
||||
from openpilot.system.hardware import PC, TICI
|
||||
|
||||
|
||||
# time step for each process
|
||||
DT_CTRL = 0.01 # controlsd
|
||||
DT_MDL = 0.05 # model
|
||||
DT_TRML = 0.5 # thermald and manager
|
||||
if TICI:
|
||||
DT_DMON = 0.05
|
||||
else:
|
||||
DT_DMON = 0.1
|
||||
|
||||
|
||||
class Priority:
|
||||
# CORE 2
|
||||
# - modeld = 55
|
||||
# - camerad = 54
|
||||
CTRL_LOW = 51 # plannerd & radard
|
||||
|
||||
# CORE 3
|
||||
# - boardd = 55
|
||||
CTRL_HIGH = 53
|
||||
|
||||
|
||||
def set_realtime_priority(level: int) -> None:
|
||||
if not PC:
|
||||
os.sched_setscheduler(0, os.SCHED_FIFO, os.sched_param(level)) # pylint: disable=no-member
|
||||
|
||||
|
||||
def set_core_affinity(cores: List[int]) -> None:
|
||||
if not PC:
|
||||
os.sched_setaffinity(0, cores) # pylint: disable=no-member
|
||||
|
||||
|
||||
def config_realtime_process(cores: Union[int, List[int]], priority: int) -> None:
|
||||
gc.disable()
|
||||
set_realtime_priority(priority)
|
||||
c = cores if isinstance(cores, list) else [cores, ]
|
||||
set_core_affinity(c)
|
||||
|
||||
|
||||
class Ratekeeper:
|
||||
def __init__(self, rate: float, print_delay_threshold: Optional[float] = 0.0) -> None:
|
||||
"""Rate in Hz for ratekeeping. print_delay_threshold must be nonnegative."""
|
||||
self._interval = 1. / rate
|
||||
self._next_frame_time = time.monotonic() + self._interval
|
||||
self._print_delay_threshold = print_delay_threshold
|
||||
self._frame = 0
|
||||
self._remaining = 0.0
|
||||
self._process_name = getproctitle()
|
||||
self._dts = deque([self._interval], maxlen=100)
|
||||
self._last_monitor_time = time.monotonic()
|
||||
|
||||
@property
|
||||
def frame(self) -> int:
|
||||
return self._frame
|
||||
|
||||
@property
|
||||
def remaining(self) -> float:
|
||||
return self._remaining
|
||||
|
||||
@property
|
||||
def lagging(self) -> bool:
|
||||
avg_dt = sum(self._dts) / len(self._dts)
|
||||
expected_dt = self._interval * (1 / 0.9)
|
||||
return avg_dt > expected_dt
|
||||
|
||||
# Maintain loop rate by calling this at the end of each loop
|
||||
def keep_time(self) -> bool:
|
||||
lagged = self.monitor_time()
|
||||
if self._remaining > 0:
|
||||
time.sleep(self._remaining)
|
||||
return lagged
|
||||
|
||||
# this only monitor the cumulative lag, but does not enforce a rate
|
||||
def monitor_time(self) -> bool:
|
||||
prev = self._last_monitor_time
|
||||
self._last_monitor_time = time.monotonic()
|
||||
self._dts.append(self._last_monitor_time - prev)
|
||||
|
||||
lagged = False
|
||||
remaining = self._next_frame_time - time.monotonic()
|
||||
self._next_frame_time += self._interval
|
||||
if self._print_delay_threshold is not None and remaining < -self._print_delay_threshold:
|
||||
print(f"{self._process_name} lagging by {-remaining * 1000:.2f} ms")
|
||||
lagged = True
|
||||
self._frame += 1
|
||||
self._remaining = remaining
|
||||
return lagged
|
||||
52
common/spinner.py
Normal file
52
common/spinner.py
Normal file
@@ -0,0 +1,52 @@
|
||||
import os
|
||||
import subprocess
|
||||
from openpilot.common.basedir import BASEDIR
|
||||
|
||||
|
||||
class Spinner():
|
||||
def __init__(self):
|
||||
try:
|
||||
self.spinner_proc = subprocess.Popen(["./spinner"],
|
||||
stdin=subprocess.PIPE,
|
||||
cwd=os.path.join(BASEDIR, "selfdrive", "ui"),
|
||||
close_fds=True)
|
||||
except OSError:
|
||||
self.spinner_proc = None
|
||||
|
||||
def __enter__(self):
|
||||
return self
|
||||
|
||||
def update(self, spinner_text: str):
|
||||
if self.spinner_proc is not None:
|
||||
self.spinner_proc.stdin.write(spinner_text.encode('utf8') + b"\n")
|
||||
try:
|
||||
self.spinner_proc.stdin.flush()
|
||||
except BrokenPipeError:
|
||||
pass
|
||||
|
||||
def update_progress(self, cur: float, total: float):
|
||||
self.update(str(round(100 * cur / total)))
|
||||
|
||||
def close(self):
|
||||
if self.spinner_proc is not None:
|
||||
self.spinner_proc.kill()
|
||||
try:
|
||||
self.spinner_proc.communicate(timeout=2.)
|
||||
except subprocess.TimeoutExpired:
|
||||
print("WARNING: failed to kill spinner")
|
||||
self.spinner_proc = None
|
||||
|
||||
def __del__(self):
|
||||
self.close()
|
||||
|
||||
def __exit__(self, exc_type, exc_value, traceback):
|
||||
self.close()
|
||||
|
||||
|
||||
if __name__ == "__main__":
|
||||
import time
|
||||
with Spinner() as s:
|
||||
s.update("Spinner text")
|
||||
time.sleep(5.0)
|
||||
print("gone")
|
||||
time.sleep(5.0)
|
||||
73
common/stat_live.py
Normal file
73
common/stat_live.py
Normal file
@@ -0,0 +1,73 @@
|
||||
import numpy as np
|
||||
|
||||
class RunningStat():
|
||||
# tracks realtime mean and standard deviation without storing any data
|
||||
def __init__(self, priors=None, max_trackable=-1):
|
||||
self.max_trackable = max_trackable
|
||||
if priors is not None:
|
||||
# initialize from history
|
||||
self.M = priors[0]
|
||||
self.S = priors[1]
|
||||
self.n = priors[2]
|
||||
self.M_last = self.M
|
||||
self.S_last = self.S
|
||||
|
||||
else:
|
||||
self.reset()
|
||||
|
||||
def reset(self):
|
||||
self.M = 0.
|
||||
self.S = 0.
|
||||
self.M_last = 0.
|
||||
self.S_last = 0.
|
||||
self.n = 0
|
||||
|
||||
def push_data(self, new_data):
|
||||
# short term memory hack
|
||||
if self.max_trackable < 0 or self.n < self.max_trackable:
|
||||
self.n += 1
|
||||
if self.n == 0:
|
||||
self.M_last = new_data
|
||||
self.M = self.M_last
|
||||
self.S_last = 0.
|
||||
else:
|
||||
self.M = self.M_last + (new_data - self.M_last) / self.n
|
||||
self.S = self.S_last + (new_data - self.M_last) * (new_data - self.M)
|
||||
self.M_last = self.M
|
||||
self.S_last = self.S
|
||||
|
||||
def mean(self):
|
||||
return self.M
|
||||
|
||||
def variance(self):
|
||||
if self.n >= 2:
|
||||
return self.S / (self.n - 1.)
|
||||
else:
|
||||
return 0
|
||||
|
||||
def std(self):
|
||||
return np.sqrt(self.variance())
|
||||
|
||||
def params_to_save(self):
|
||||
return [self.M, self.S, self.n]
|
||||
|
||||
class RunningStatFilter():
|
||||
def __init__(self, raw_priors=None, filtered_priors=None, max_trackable=-1):
|
||||
self.raw_stat = RunningStat(raw_priors, -1)
|
||||
self.filtered_stat = RunningStat(filtered_priors, max_trackable)
|
||||
|
||||
def reset(self):
|
||||
self.raw_stat.reset()
|
||||
self.filtered_stat.reset()
|
||||
|
||||
def push_and_update(self, new_data):
|
||||
_std_last = self.raw_stat.std()
|
||||
self.raw_stat.push_data(new_data)
|
||||
_delta_std = self.raw_stat.std() - _std_last
|
||||
if _delta_std <= 0:
|
||||
self.filtered_stat.push_data(new_data)
|
||||
else:
|
||||
pass
|
||||
# self.filtered_stat.push_data(self.filtered_stat.mean())
|
||||
|
||||
# class SequentialBayesian():
|
||||
10
common/statlog.h
Normal file
10
common/statlog.h
Normal file
@@ -0,0 +1,10 @@
|
||||
#pragma once
|
||||
|
||||
#define STATLOG_GAUGE "g"
|
||||
#define STATLOG_SAMPLE "sa"
|
||||
|
||||
void statlog_log(const char* metric_type, const char* metric, int value);
|
||||
void statlog_log(const char* metric_type, const char* metric, float value);
|
||||
|
||||
#define statlog_gauge(metric, value) statlog_log(STATLOG_GAUGE, metric, value)
|
||||
#define statlog_sample(metric, value) statlog_log(STATLOG_SAMPLE, metric, value)
|
||||
89
common/swaglog.h
Normal file
89
common/swaglog.h
Normal file
@@ -0,0 +1,89 @@
|
||||
#pragma once
|
||||
|
||||
#include "common/timing.h"
|
||||
|
||||
#define CLOUDLOG_DEBUG 10
|
||||
#define CLOUDLOG_INFO 20
|
||||
#define CLOUDLOG_WARNING 30
|
||||
#define CLOUDLOG_ERROR 40
|
||||
#define CLOUDLOG_CRITICAL 50
|
||||
|
||||
|
||||
void cloudlog_e(int levelnum, const char* filename, int lineno, const char* func,
|
||||
const char* fmt, ...) /*__attribute__ ((format (printf, 6, 7)))*/;
|
||||
|
||||
void cloudlog_te(int levelnum, const char* filename, int lineno, const char* func,
|
||||
const char* fmt, ...) /*__attribute__ ((format (printf, 6, 7)))*/;
|
||||
|
||||
void cloudlog_te(int levelnum, const char* filename, int lineno, const char* func,
|
||||
uint32_t frame_id, const char* fmt, ...) /*__attribute__ ((format (printf, 6, 7)))*/;
|
||||
|
||||
|
||||
#define cloudlog(lvl, fmt, ...) cloudlog_e(lvl, __FILE__, __LINE__, \
|
||||
__func__, \
|
||||
fmt, ## __VA_ARGS__)
|
||||
|
||||
#define cloudlog_t(lvl, ...) cloudlog_te(lvl, __FILE__, __LINE__, \
|
||||
__func__, \
|
||||
__VA_ARGS__)
|
||||
|
||||
|
||||
#define cloudlog_rl(burst, millis, lvl, fmt, ...) \
|
||||
{ \
|
||||
static uint64_t __begin = 0; \
|
||||
static int __printed = 0; \
|
||||
static int __missed = 0; \
|
||||
\
|
||||
int __burst = (burst); \
|
||||
int __millis = (millis); \
|
||||
uint64_t __ts = nanos_since_boot(); \
|
||||
\
|
||||
if (!__begin) { __begin = __ts; } \
|
||||
\
|
||||
if (__begin + __millis*1000000ULL < __ts) { \
|
||||
if (__missed) { \
|
||||
cloudlog(CLOUDLOG_WARNING, "cloudlog: %d messages suppressed", __missed); \
|
||||
} \
|
||||
__begin = 0; \
|
||||
__printed = 0; \
|
||||
__missed = 0; \
|
||||
} \
|
||||
\
|
||||
if (__printed < __burst) { \
|
||||
cloudlog(lvl, fmt, ## __VA_ARGS__); \
|
||||
__printed++; \
|
||||
} else { \
|
||||
__missed++; \
|
||||
} \
|
||||
}
|
||||
|
||||
|
||||
#define LOGT(...) cloudlog_t(CLOUDLOG_DEBUG, __VA_ARGS__)
|
||||
#define LOGD(fmt, ...) cloudlog(CLOUDLOG_DEBUG, fmt, ## __VA_ARGS__)
|
||||
#define LOG(fmt, ...) cloudlog(CLOUDLOG_INFO, fmt, ## __VA_ARGS__)
|
||||
#define LOGW(fmt, ...) cloudlog(CLOUDLOG_WARNING, fmt, ## __VA_ARGS__)
|
||||
#define LOGE(fmt, ...) cloudlog(CLOUDLOG_ERROR, fmt, ## __VA_ARGS__)
|
||||
|
||||
#define LOGD_100(fmt, ...) cloudlog_rl(2, 100, CLOUDLOG_DEBUG, fmt, ## __VA_ARGS__)
|
||||
#define LOG_100(fmt, ...) cloudlog_rl(2, 100, CLOUDLOG_INFO, fmt, ## __VA_ARGS__)
|
||||
#define LOGW_100(fmt, ...) cloudlog_rl(2, 100, CLOUDLOG_WARNING, fmt, ## __VA_ARGS__)
|
||||
#define LOGE_100(fmt, ...) cloudlog_rl(2, 100, CLOUDLOG_ERROR, fmt, ## __VA_ARGS__)
|
||||
|
||||
|
||||
// 添加模块上下文支持
|
||||
void cloudlog_bind(const char* key, const char* value);
|
||||
|
||||
// 添加新的带上下文的日志函数
|
||||
void cloudlog_ec(int levelnum, const char* filename, int lineno, const char* func,
|
||||
const char* fmt, ...) /*__attribute__ ((format (printf, 6, 7)))*/;
|
||||
|
||||
// 新增带上下文的宏定义
|
||||
#define cloudlog_c(lvl, fmt, ...) cloudlog_ec(lvl, __FILE__, __LINE__, \
|
||||
__func__, \
|
||||
fmt, ## __VA_ARGS__)
|
||||
|
||||
// 新增便捷宏
|
||||
#define LOGD_C(fmt, ...) cloudlog_c(CLOUDLOG_DEBUG, fmt, ## __VA_ARGS__)
|
||||
#define LOG_C(fmt, ...) cloudlog_c(CLOUDLOG_INFO, fmt, ## __VA_ARGS__)
|
||||
#define LOGW_C(fmt, ...) cloudlog_c(CLOUDLOG_WARNING, fmt, ## __VA_ARGS__)
|
||||
#define LOGE_C(fmt, ...) cloudlog_c(CLOUDLOG_ERROR, fmt, ## __VA_ARGS__)
|
||||
496
common/swaglog.py
Normal file
496
common/swaglog.py
Normal file
@@ -0,0 +1,496 @@
|
||||
"""
|
||||
日志系统核心模块,提供以下功能:
|
||||
|
||||
模块职责:
|
||||
1. 实现跨进程的日志收集和转发机制
|
||||
2. 提供结构化日志记录能力
|
||||
3. 统一管理控制台输出和日志服务端转发
|
||||
|
||||
设计目标:
|
||||
- 解耦日志产生与写入操作
|
||||
- 支持集中式日志管理(通过logmessaged服务)
|
||||
- 提供模块化上下文追踪能力
|
||||
|
||||
使用示例:
|
||||
1. 基础日志记录:
|
||||
cloudlog.info("系统启动")
|
||||
|
||||
2. 带模块标识的日志:
|
||||
cloudlog.warning("传感器异常", module="sensor")
|
||||
|
||||
3. 结构化日志:
|
||||
cloudlog.error({
|
||||
"event": "network_error",
|
||||
"retry_count": 3,
|
||||
"endpoint": "api/v1/connect"
|
||||
})
|
||||
|
||||
主要组件及其职责:
|
||||
1. UnixDomainSocketHandler - 基于ZMQ的日志转发处理器
|
||||
▹ 实现IPC通信管理(连接/重连机制)
|
||||
▹ 处理多进程资源隔离(PID检测)
|
||||
▹ 非阻塞式网络传输
|
||||
|
||||
2. SwagLogManager - 日志系统管理中枢
|
||||
▹ 处理器配置(控制台/套接字)
|
||||
▹ 动态日志方法包装(debug/info/warning/error)
|
||||
▹ 调用栈元数据自动注入
|
||||
|
||||
3. SwagFormatter - 结构化日志格式化(在logging_extra.py实现)
|
||||
▹ 上下文信息整合
|
||||
▹ 自定义目录标记提取
|
||||
▹ 多进程安全格式化
|
||||
|
||||
全局实例说明:
|
||||
- log_manager: 单例日志管理器(线程安全初始化)
|
||||
- cloudlog/log: 统一日志接口(支持上下文绑定)
|
||||
|
||||
数据流向:
|
||||
应用模块 → SwagLogger → 控制台输出
|
||||
↳→ UnixDomainSocketHandler → ZMQ IPC → logmessaged
|
||||
↳→ 文件系统/网络存储
|
||||
|
||||
扩展性说明:
|
||||
1. 新增日志处理器:通过_setup_handlers()添加新Handler
|
||||
2. 定制日志格式:修改SwagFormatter实现
|
||||
3. 调整日志级别:通过DP参数或环境变量实时生效
|
||||
"""
|
||||
import time # 新增导入
|
||||
import json
|
||||
import logging
|
||||
import os
|
||||
import traceback
|
||||
import warnings
|
||||
import zmq
|
||||
from pathlib import Path
|
||||
from openpilot.common.logging_extra import (
|
||||
SwagLogger, SwagFormatter, json_robust_dumps,CustomSwaglogRotatingFileHandler
|
||||
)
|
||||
from openpilot.common.params import Params
|
||||
|
||||
MEDIA_PATH = "/data/media/0/c2_logs/swaglog"
|
||||
DEFAULT_PATH = "/data/log/"
|
||||
SWAGLOG_DIR = MEDIA_PATH if os.path.exists("/data/media/0") else DEFAULT_PATH
|
||||
|
||||
# 日志滚动配置
|
||||
LOG_CONFIG = {
|
||||
'INTERVAL': 60,
|
||||
'MAX_BYTES': 1024 * 128,
|
||||
'BACKUP_COUNT': 2500,
|
||||
'ENCODING': 'utf8',
|
||||
'MAX_AGE': 4 * 24 * 3600, # 4天
|
||||
'CLEAN_INTERVAL': 6 * 3600 # 6小时清理一次
|
||||
}
|
||||
|
||||
def clean_old_logs():
|
||||
"""清理过期日志文件"""
|
||||
try:
|
||||
current_time = time.time()
|
||||
for log_file in Path(SWAGLOG_DIR).glob("*.log"):
|
||||
if current_time - log_file.stat().st_mtime > LOG_CONFIG['MAX_AGE']:
|
||||
log_file.unlink()
|
||||
except Exception as e:
|
||||
print(f"CleanLogError: {str(e)}")
|
||||
|
||||
def formatted_print(level, module, message):
|
||||
"""使用统一格式打印消息"""
|
||||
current_time = time.strftime("%Y-%m-%d %H:%M:%S", time.localtime())
|
||||
print(f"{current_time} | {level} | {module} | {message}")
|
||||
|
||||
|
||||
class UnixDomainSocketHandler(logging.Handler):
|
||||
"""Unix域套接字处理器,用于日志转发"""
|
||||
def __init__(self, formatter):
|
||||
super().__init__()
|
||||
self.setFormatter(formatter)
|
||||
self.pid = None
|
||||
self.zctx = None
|
||||
self.sock = None
|
||||
self.swaglogger = getattr(formatter, 'swaglogger', None) # 添加这行
|
||||
|
||||
def __del__(self):
|
||||
if self.sock is not None:
|
||||
self.sock.close()
|
||||
if self.zctx is not None:
|
||||
self.zctx.term()
|
||||
|
||||
def connect(self):
|
||||
self.zctx = zmq.Context()
|
||||
self.sock = self.zctx.socket(zmq.PUSH)
|
||||
self.sock.setsockopt(zmq.LINGER, 10)
|
||||
self.sock.connect("ipc:///tmp/logmessage")
|
||||
self.pid = os.getpid()
|
||||
|
||||
def emit(self, record):
|
||||
# 检查进程ID是否变化或未初始化,如果是则重新连接
|
||||
if self.pid is None or os.getpid() != self.pid:
|
||||
warnings.filterwarnings("ignore", category=ResourceWarning, message="unclosed.*<zmq.*>")
|
||||
try:
|
||||
self.connect()
|
||||
except zmq.error.ZMQError:
|
||||
return
|
||||
|
||||
try:
|
||||
# 获取模块名,优先从record.module获取
|
||||
module = getattr(record, 'module', 'unknown')
|
||||
|
||||
# 如果消息是字典且包含module字段,使用该字段
|
||||
if isinstance(record.msg, dict) and 'module' in record.msg:
|
||||
module = record.msg['module']
|
||||
|
||||
# 简化消息结构
|
||||
msg_content = record.msg
|
||||
if isinstance(msg_content, dict):
|
||||
msg_content = msg_content.get('msg', str(msg_content))
|
||||
|
||||
# 去除 ANSI 颜色代码
|
||||
import re
|
||||
msg_content = re.sub(r'\x1b\[[0-9;]*m', '', str(msg_content))
|
||||
|
||||
raw_data = {
|
||||
'level': record.levelno,
|
||||
'msg': msg_content, # 使用去除颜色代码后的消息
|
||||
'module': module,
|
||||
'timestamp': time.strftime("%Y-%m-%d %H:%M:%S", time.localtime()) # 使用本地时间
|
||||
}
|
||||
|
||||
# 编码并发送消息
|
||||
payload = b'\x01' + json_robust_dumps(raw_data).encode('utf-8')
|
||||
self.sock.send(payload, zmq.NOBLOCK)
|
||||
except zmq.error.Again:
|
||||
pass # 队列满时正常忽略
|
||||
except Exception as e:
|
||||
# 简化异常处理,只记录错误类型和消息
|
||||
print(f"LogEmitError({type(e).__name__}): {str(e)}")
|
||||
|
||||
def format(self, record):
|
||||
try:
|
||||
if isinstance(record.msg, dict):
|
||||
msg = record.msg.copy()
|
||||
else:
|
||||
raw_msg = str(record.msg)
|
||||
try:
|
||||
msg = json.loads(raw_msg)
|
||||
except json.JSONDecodeError:
|
||||
msg = {'msg': raw_msg}
|
||||
|
||||
if self.swaglogger and isinstance(msg, dict):
|
||||
ctx = self.swaglogger.get_ctx() or {}
|
||||
msg = {**ctx, **msg}
|
||||
|
||||
# 提取实际消息内容
|
||||
if isinstance(msg, dict):
|
||||
msg_content = msg.get('msg', str(msg))
|
||||
else:
|
||||
msg_content = str(msg)
|
||||
|
||||
# 设置记录的消息为提取的内容
|
||||
record.msg = msg_content
|
||||
|
||||
return super().format(record)
|
||||
except Exception as e:
|
||||
return f"FormatterError: {str(e)}"
|
||||
|
||||
# class SwaglogRotatingFileHandler(logging.handlers.BaseRotatingHandler):
|
||||
# """滚动日志文件处理器,支持大小和时间触发滚动"""
|
||||
# def __init__(self, base_filename, interval=60, max_bytes=1024*256, backup_count=2500, encoding=None, startup_time=None):
|
||||
# super().__init__(base_filename, mode="a", encoding=encoding, delay=True)
|
||||
# self.base_filename = base_filename
|
||||
# self.interval = interval # 秒
|
||||
# self.max_bytes = max_bytes
|
||||
# self.backup_count = backup_count
|
||||
# # 保存启动时间,如果未提供则使用当前时间
|
||||
# self.startup_time = startup_time or time.strftime("%Y%m%d_%H%M%S")
|
||||
# self.log_files = self.get_existing_logfiles()
|
||||
# log_indexes = [f.split(".")[-1] for f in self.log_files]
|
||||
# self.last_file_idx = max([int(i) for i in log_indexes if i.isdigit()] or [-1])
|
||||
# self.last_rollover = None
|
||||
# self.doRollover()
|
||||
|
||||
# def _open(self):
|
||||
# self.last_rollover = time.time()
|
||||
# self.last_file_idx += 1
|
||||
# # 在文件名中添加启动时间
|
||||
# next_filename = f"{self.base_filename}.{self.startup_time}.{self.last_file_idx:010}"
|
||||
# stream = open(next_filename, self.mode, encoding=self.encoding)
|
||||
# self.log_files.insert(0, next_filename)
|
||||
# return stream
|
||||
|
||||
# def get_existing_logfiles(self):
|
||||
# log_files = list()
|
||||
# base_dir = os.path.dirname(self.base_filename)
|
||||
# # 修改文件匹配逻辑,考虑启动时间
|
||||
# for fn in os.listdir(base_dir):
|
||||
# fp = os.path.join(base_dir, fn)
|
||||
# if fp.startswith(self.base_filename) and os.path.isfile(fp):
|
||||
# log_files.append(fp)
|
||||
# return sorted(log_files)
|
||||
|
||||
# def shouldRollover(self, record):
|
||||
# size_exceeded = self.max_bytes > 0 and self.stream.tell() >= self.max_bytes
|
||||
# time_exceeded = self.interval > 0 and time.time() - self.last_rollover >= self.interval
|
||||
# return size_exceeded or time_exceeded
|
||||
|
||||
# def doRollover(self):
|
||||
# if self.stream:
|
||||
# self.stream.close()
|
||||
# self.stream = self._open()
|
||||
|
||||
# if self.backup_count > 0:
|
||||
# while len(self.log_files) > self.backup_count:
|
||||
# to_delete = self.log_files.pop()
|
||||
# if os.path.exists(to_delete): # 安全检查
|
||||
# os.remove(to_delete)
|
||||
|
||||
class AnsiColorStripFormatter(logging.Formatter):
|
||||
"""去除ANSI颜色代码的格式化器"""
|
||||
def __init__(self, orig_formatter):
|
||||
super().__init__()
|
||||
self.orig_formatter = orig_formatter
|
||||
|
||||
def format(self, record):
|
||||
import re
|
||||
# 先使用原始格式化器格式化
|
||||
formatted = self.orig_formatter.format(record)
|
||||
# 去除所有ANSI颜色代码
|
||||
ansi_escape = re.compile(r'\x1B(?:[@-Z\\-_]|\[[0-?]*[ -/]*[@-~])')
|
||||
return ansi_escape.sub('', formatted)
|
||||
|
||||
def get_file_handler():
|
||||
"""获取文件日志处理器"""
|
||||
Path(SWAGLOG_DIR).mkdir(parents=True, exist_ok=True)
|
||||
base_filename = os.path.join(SWAGLOG_DIR, "swaglog")
|
||||
startup_time = time.strftime("%Y%m%d_%H%M%S")
|
||||
|
||||
handler = CustomSwaglogRotatingFileHandler( # 改用 CustomSwaglogRotatingFileHandler
|
||||
base_filename,
|
||||
interval=LOG_CONFIG['INTERVAL'],
|
||||
max_bytes=LOG_CONFIG['MAX_BYTES'],
|
||||
backup_count=LOG_CONFIG['BACKUP_COUNT'],
|
||||
encoding=LOG_CONFIG['ENCODING']
|
||||
)
|
||||
return handler
|
||||
|
||||
def add_file_handler(log):
|
||||
"""
|
||||
添加文件日志处理器到swaglog
|
||||
当logmessaged不运行时可用于存储日志
|
||||
"""
|
||||
handler = get_file_handler()
|
||||
# 使用AnsiColorStripFormatter包装原始格式化器,去除颜色代码
|
||||
orig_formatter = SwagFormatter(log)
|
||||
handler.setFormatter(AnsiColorStripFormatter(orig_formatter))
|
||||
|
||||
# 根据dp_log_level设置文件日志级别
|
||||
params = Params()
|
||||
dp_log_level = params.get("dp_log_level", encoding='utf8')
|
||||
if dp_log_level is not None:
|
||||
level_map = {
|
||||
"0": logging.WARNING,
|
||||
"1": logging.INFO,
|
||||
"2": logging.DEBUG
|
||||
}
|
||||
handler.setLevel(level_map.get(dp_log_level, logging.INFO))
|
||||
else:
|
||||
handler.setLevel(logging.INFO)
|
||||
|
||||
log.addHandler(handler)
|
||||
|
||||
class SwagLogManager:
|
||||
"""日志管理器,处理日志配置和格式化"""
|
||||
_instance = None
|
||||
_initialized = False
|
||||
|
||||
def __new__(cls):
|
||||
if cls._instance is None:
|
||||
cls._instance = super(SwagLogManager, cls).__new__(cls)
|
||||
return cls._instance
|
||||
|
||||
def __init__(self):
|
||||
# 确保初始化代码只执行一次
|
||||
if SwagLogManager._initialized:
|
||||
return
|
||||
SwagLogManager._initialized = True
|
||||
|
||||
self.logger = SwagLogger()
|
||||
self.logger.setLevel(logging.DEBUG)
|
||||
|
||||
# 清除所有现有处理器
|
||||
self.logger.handlers.clear()
|
||||
|
||||
# 设置日志处理器
|
||||
self._setup_handlers()
|
||||
self._wrap_log_methods()
|
||||
|
||||
def _get_console_log_level(self):
|
||||
"""获取控制台日志级别"""
|
||||
params = Params()
|
||||
dp_log_level = params.get("dp_log_level", encoding='utf8')
|
||||
|
||||
if dp_log_level is not None:
|
||||
level_map = {"0": "warning", "1": "info", "2": "debug"}
|
||||
print_level = level_map.get(dp_log_level, "warning")
|
||||
else:
|
||||
print_level = os.environ.get('LOGPRINT', 'warning')
|
||||
|
||||
return {
|
||||
'debug': logging.DEBUG,
|
||||
'info': logging.INFO,
|
||||
'warning': logging.WARNING
|
||||
}.get(print_level, logging.WARNING)
|
||||
|
||||
def _setup_handlers(self):
|
||||
clean_old_logs() # 启动时清理
|
||||
"""设置日志处理器"""
|
||||
# 清除所有现有处理器
|
||||
self.logger.handlers.clear()
|
||||
|
||||
# 使用控制台和文件处理器
|
||||
console_handler = logging.StreamHandler()
|
||||
console_handler.setLevel(self._get_console_log_level())
|
||||
console_handler.setFormatter(SwagFormatter(swaglogger=self.logger))
|
||||
self.logger.addHandler(console_handler)
|
||||
|
||||
|
||||
# 根据logmessaged可用性决定使用哪个处理器
|
||||
if self._is_logmessaged_available():
|
||||
# 只使用socket_handler
|
||||
socket_handler = UnixDomainSocketHandler(SwagFormatter(swaglogger=self.logger))
|
||||
socket_handler.setLevel(logging.DEBUG)
|
||||
self.logger.addHandler(socket_handler)
|
||||
formatted_print("INFO", "swaglog", "logmessaged可用,使用网络日志转发")
|
||||
else:
|
||||
add_file_handler(self.logger)
|
||||
formatted_print("INFO", "swaglog", "logmessaged不可用,已添加本地文件日志备份")
|
||||
|
||||
def _is_logmessaged_available(self):
|
||||
"""检查logmessaged服务是否可用"""
|
||||
try:
|
||||
# 尝试连接logmessaged服务
|
||||
test_ctx = zmq.Context()
|
||||
test_sock = test_ctx.socket(zmq.PUSH)
|
||||
test_sock.setsockopt(zmq.LINGER, 0) # 不等待,立即返回
|
||||
test_sock.setsockopt(zmq.RCVTIMEO, 100) # 100ms超时
|
||||
test_sock.connect("ipc:///tmp/logmessage")
|
||||
|
||||
# 尝试发送一个测试消息
|
||||
test_data = {
|
||||
'level': logging.INFO,
|
||||
'msg': 'Testing logmessaged connection', # 直接使用字符串作为消息内容
|
||||
'module': 'swaglog',
|
||||
'timestamp': time.strftime("%Y-%m-%d %H:%M:%S", time.localtime()) # 使用本地时间
|
||||
}
|
||||
payload = b'\x01' + json_robust_dumps(test_data).encode('utf-8')
|
||||
test_sock.send(payload, zmq.NOBLOCK)
|
||||
|
||||
# 清理资源
|
||||
test_sock.close()
|
||||
test_ctx.term()
|
||||
return True
|
||||
except zmq.error.Again:
|
||||
# 队列满但服务可用
|
||||
return True
|
||||
except Exception:
|
||||
# 连接失败,服务不可用
|
||||
return False
|
||||
|
||||
|
||||
def _get_caller_info(self):
|
||||
"""获取调用者信息 - 简化版"""
|
||||
try:
|
||||
for frame in traceback.extract_stack()[-5:-1]: # 限制搜索范围
|
||||
if not frame.filename.endswith('swaglog.py'):
|
||||
return {'file': frame.filename, 'line': frame.lineno}
|
||||
except:
|
||||
pass
|
||||
return None
|
||||
|
||||
def _create_log_record(self, level_name, formatted_msg, current_module):
|
||||
"""创建日志记录 - 简化版"""
|
||||
return logging.LogRecord(
|
||||
name=current_module or 'unknown',
|
||||
level=logging.getLevelName(level_name),
|
||||
pathname='', # 简化,不需要完整路径
|
||||
lineno=0,
|
||||
msg=formatted_msg,
|
||||
args=(),
|
||||
exc_info=None,
|
||||
func=None
|
||||
)
|
||||
|
||||
def _wrap_log_method(self, original_method, level_name):
|
||||
def wrapped_method(msg, *args, **kwargs):
|
||||
if not msg:
|
||||
return None
|
||||
|
||||
try:
|
||||
# 提取模块名
|
||||
module = kwargs.pop('module', None)
|
||||
if not module:
|
||||
for frame in traceback.extract_stack()[-5:-1]:
|
||||
if not frame.filename.endswith('swaglog.py'):
|
||||
module = Path(frame.filename).stem
|
||||
break
|
||||
|
||||
# 确保模块名不为空
|
||||
if not module:
|
||||
module = 'unknown'
|
||||
|
||||
# 简化消息处理
|
||||
if isinstance(msg, dict):
|
||||
msg_payload = msg.copy() # 创建副本避免修改原始数据
|
||||
# 确保消息中包含模块名
|
||||
if 'module' not in msg_payload:
|
||||
msg_payload['module'] = module
|
||||
else:
|
||||
msg_str = str(msg)
|
||||
if args:
|
||||
try:
|
||||
msg_str = msg_str % args
|
||||
except:
|
||||
pass
|
||||
msg_payload = {'msg': msg_str, 'module': module}
|
||||
|
||||
# 检查是否为启动日志,如果是则强制打印到控制台
|
||||
is_startup_log = False
|
||||
if isinstance(msg_payload.get('msg'), str):
|
||||
msg_content = msg_payload.get('msg', '')
|
||||
is_startup_log = '启动' in msg_content or 'start' in msg_content.lower()
|
||||
|
||||
# 创建并处理记录
|
||||
record = self._create_log_record(level_name, msg_payload, module)
|
||||
# 确保记录对象有module属性
|
||||
record.module = module
|
||||
|
||||
# 确保raw_msg属性存在,供SwagFormatter使用
|
||||
record.raw_msg = msg_payload
|
||||
|
||||
# 对于启动日志,如果当前日志级别不足以显示,则使用格式化器格式化后打印
|
||||
if is_startup_log and level_name in ('INFO', 'DEBUG') and self._get_console_log_level() > logging.INFO:
|
||||
# 使用与SwagFormatter一致的格式化方式
|
||||
formatter = SwagFormatter(swaglogger=self.logger)
|
||||
formatted_msg = formatter.format(record)
|
||||
print(formatted_msg)
|
||||
else:
|
||||
self.logger.handle(record)
|
||||
|
||||
except Exception as e:
|
||||
formatted_print("ERROR", "swaglog", f"LogError: {e}")
|
||||
return None
|
||||
return wrapped_method
|
||||
|
||||
def _wrap_log_methods(self):
|
||||
"""包装所有日志方法"""
|
||||
original_methods = {
|
||||
'debug': self.logger.debug,
|
||||
'info': self.logger.info,
|
||||
'warning': self.logger.warning,
|
||||
'error': self.logger.error
|
||||
}
|
||||
|
||||
for level, method in original_methods.items():
|
||||
setattr(self.logger, level, self._wrap_log_method(method, level.upper()))
|
||||
|
||||
# 创建全局日志实例
|
||||
log_manager = SwagLogManager()
|
||||
cloudlog = log = log_manager.logger
|
||||
0
common/tests/__init__.py
Normal file
0
common/tests/__init__.py
Normal file
27
common/tests/test_file_helpers.py
Normal file
27
common/tests/test_file_helpers.py
Normal file
@@ -0,0 +1,27 @@
|
||||
import os
|
||||
import unittest
|
||||
from uuid import uuid4
|
||||
|
||||
from openpilot.common.file_helpers import atomic_write_on_fs_tmp
|
||||
from openpilot.common.file_helpers import atomic_write_in_dir
|
||||
|
||||
|
||||
class TestFileHelpers(unittest.TestCase):
|
||||
def run_atomic_write_func(self, atomic_write_func):
|
||||
path = f"/tmp/tmp{uuid4()}"
|
||||
with atomic_write_func(path) as f:
|
||||
f.write("test")
|
||||
|
||||
with open(path) as f:
|
||||
self.assertEqual(f.read(), "test")
|
||||
os.remove(path)
|
||||
|
||||
def test_atomic_write_on_fs_tmp(self):
|
||||
self.run_atomic_write_func(atomic_write_on_fs_tmp)
|
||||
|
||||
def test_atomic_write_in_dir(self):
|
||||
self.run_atomic_write_func(atomic_write_in_dir)
|
||||
|
||||
|
||||
if __name__ == "__main__":
|
||||
unittest.main()
|
||||
26
common/tests/test_numpy_fast.py
Normal file
26
common/tests/test_numpy_fast.py
Normal file
@@ -0,0 +1,26 @@
|
||||
import numpy as np
|
||||
import unittest
|
||||
|
||||
from openpilot.common.numpy_fast import interp
|
||||
|
||||
|
||||
class InterpTest(unittest.TestCase):
|
||||
def test_correctness_controls(self):
|
||||
_A_CRUISE_MIN_BP = np.asarray([0., 5., 10., 20., 40.])
|
||||
_A_CRUISE_MIN_V = np.asarray([-1.0, -.8, -.67, -.5, -.30])
|
||||
v_ego_arr = [-1, -1e-12, 0, 4, 5, 6, 7, 10, 11, 15.2, 20, 21, 39,
|
||||
39.999999, 40, 41]
|
||||
|
||||
expected = np.interp(v_ego_arr, _A_CRUISE_MIN_BP, _A_CRUISE_MIN_V)
|
||||
actual = interp(v_ego_arr, _A_CRUISE_MIN_BP, _A_CRUISE_MIN_V)
|
||||
|
||||
np.testing.assert_equal(actual, expected)
|
||||
|
||||
for v_ego in v_ego_arr:
|
||||
expected = np.interp(v_ego, _A_CRUISE_MIN_BP, _A_CRUISE_MIN_V)
|
||||
actual = interp(v_ego, _A_CRUISE_MIN_BP, _A_CRUISE_MIN_V)
|
||||
np.testing.assert_equal(actual, expected)
|
||||
|
||||
|
||||
if __name__ == "__main__":
|
||||
unittest.main()
|
||||
120
common/tests/test_params.py
Normal file
120
common/tests/test_params.py
Normal file
@@ -0,0 +1,120 @@
|
||||
import os
|
||||
import threading
|
||||
import time
|
||||
import tempfile
|
||||
import shutil
|
||||
import uuid
|
||||
import unittest
|
||||
|
||||
from openpilot.common.params import Params, ParamKeyType, UnknownKeyName
|
||||
|
||||
class TestParams(unittest.TestCase):
|
||||
def setUp(self):
|
||||
self.tmpdir = tempfile.mkdtemp()
|
||||
print("using", self.tmpdir)
|
||||
self.params = Params(self.tmpdir)
|
||||
|
||||
def tearDown(self):
|
||||
shutil.rmtree(self.tmpdir)
|
||||
|
||||
def test_params_put_and_get(self):
|
||||
self.params.put("DongleId", "cb38263377b873ee")
|
||||
assert self.params.get("DongleId") == b"cb38263377b873ee"
|
||||
|
||||
def test_params_non_ascii(self):
|
||||
st = b"\xe1\x90\xff"
|
||||
self.params.put("CarParams", st)
|
||||
assert self.params.get("CarParams") == st
|
||||
|
||||
def test_params_get_cleared_manager_start(self):
|
||||
self.params.put("CarParams", "test")
|
||||
self.params.put("DongleId", "cb38263377b873ee")
|
||||
assert self.params.get("CarParams") == b"test"
|
||||
|
||||
undefined_param = self.params.get_param_path(uuid.uuid4().hex)
|
||||
with open(undefined_param, "w") as f:
|
||||
f.write("test")
|
||||
assert os.path.isfile(undefined_param)
|
||||
|
||||
self.params.clear_all(ParamKeyType.CLEAR_ON_MANAGER_START)
|
||||
assert self.params.get("CarParams") is None
|
||||
assert self.params.get("DongleId") is not None
|
||||
assert not os.path.isfile(undefined_param)
|
||||
|
||||
def test_params_two_things(self):
|
||||
self.params.put("DongleId", "bob")
|
||||
self.params.put("AthenadPid", "123")
|
||||
assert self.params.get("DongleId") == b"bob"
|
||||
assert self.params.get("AthenadPid") == b"123"
|
||||
|
||||
def test_params_get_block(self):
|
||||
def _delayed_writer():
|
||||
time.sleep(0.1)
|
||||
self.params.put("CarParams", "test")
|
||||
threading.Thread(target=_delayed_writer).start()
|
||||
assert self.params.get("CarParams") is None
|
||||
assert self.params.get("CarParams", True) == b"test"
|
||||
|
||||
def test_params_unknown_key_fails(self):
|
||||
with self.assertRaises(UnknownKeyName):
|
||||
self.params.get("swag")
|
||||
|
||||
with self.assertRaises(UnknownKeyName):
|
||||
self.params.get_bool("swag")
|
||||
|
||||
with self.assertRaises(UnknownKeyName):
|
||||
self.params.put("swag", "abc")
|
||||
|
||||
with self.assertRaises(UnknownKeyName):
|
||||
self.params.put_bool("swag", True)
|
||||
|
||||
def test_remove_not_there(self):
|
||||
assert self.params.get("CarParams") is None
|
||||
self.params.remove("CarParams")
|
||||
assert self.params.get("CarParams") is None
|
||||
|
||||
def test_get_bool(self):
|
||||
self.params.remove("IsMetric")
|
||||
self.assertFalse(self.params.get_bool("IsMetric"))
|
||||
|
||||
self.params.put_bool("IsMetric", True)
|
||||
self.assertTrue(self.params.get_bool("IsMetric"))
|
||||
|
||||
self.params.put_bool("IsMetric", False)
|
||||
self.assertFalse(self.params.get_bool("IsMetric"))
|
||||
|
||||
self.params.put("IsMetric", "1")
|
||||
self.assertTrue(self.params.get_bool("IsMetric"))
|
||||
|
||||
self.params.put("IsMetric", "0")
|
||||
self.assertFalse(self.params.get_bool("IsMetric"))
|
||||
|
||||
def test_put_non_blocking_with_get_block(self):
|
||||
q = Params(self.tmpdir)
|
||||
def _delayed_writer():
|
||||
time.sleep(0.1)
|
||||
self.params.put_nonblocking("CarParams", "test", self.tmpdir)
|
||||
threading.Thread(target=_delayed_writer).start()
|
||||
assert q.get("CarParams") is None
|
||||
assert q.get("CarParams", True) == b"test"
|
||||
|
||||
def test_put_bool_non_blocking_with_get_block(self):
|
||||
q = Params(self.tmpdir)
|
||||
def _delayed_writer():
|
||||
time.sleep(0.1)
|
||||
self.params.put_bool_nonblocking("CarParams", True, self.tmpdir)
|
||||
threading.Thread(target=_delayed_writer).start()
|
||||
assert q.get("CarParams") is None
|
||||
assert q.get("CarParams", True) == b"1"
|
||||
|
||||
def test_params_all_keys(self):
|
||||
keys = Params().all_keys()
|
||||
|
||||
# sanity checks
|
||||
assert len(keys) > 20
|
||||
assert len(keys) == len(set(keys))
|
||||
assert b"CarParams" in keys
|
||||
|
||||
|
||||
if __name__ == "__main__":
|
||||
unittest.main()
|
||||
63
common/text_window.py
Executable file
63
common/text_window.py
Executable file
@@ -0,0 +1,63 @@
|
||||
#!/usr/bin/env python3
|
||||
import os
|
||||
import time
|
||||
import subprocess
|
||||
from openpilot.common.basedir import BASEDIR
|
||||
|
||||
|
||||
class TextWindow:
|
||||
def __init__(self, text):
|
||||
try:
|
||||
self.text_proc = subprocess.Popen(["./text", text],
|
||||
stdin=subprocess.PIPE,
|
||||
cwd=os.path.join(BASEDIR, "selfdrive", "ui"),
|
||||
close_fds=True)
|
||||
except OSError:
|
||||
self.text_proc = None
|
||||
|
||||
def get_status(self):
|
||||
if self.text_proc is not None:
|
||||
self.text_proc.poll()
|
||||
return self.text_proc.returncode
|
||||
return None
|
||||
|
||||
def __enter__(self):
|
||||
return self
|
||||
|
||||
def close(self):
|
||||
if self.text_proc is not None:
|
||||
self.text_proc.terminate()
|
||||
self.text_proc = None
|
||||
|
||||
def wait_for_exit(self):
|
||||
if self.text_proc is not None:
|
||||
while True:
|
||||
if self.get_status() == 1:
|
||||
return
|
||||
time.sleep(0.1)
|
||||
|
||||
def __del__(self):
|
||||
self.close()
|
||||
|
||||
def __exit__(self, exc_type, exc_value, traceback):
|
||||
self.close()
|
||||
|
||||
|
||||
if __name__ == "__main__":
|
||||
text = """Traceback (most recent call last):
|
||||
File "./controlsd.py", line 608, in <module>
|
||||
main()
|
||||
File "./controlsd.py", line 604, in main
|
||||
controlsd_thread(sm, pm, logcan)
|
||||
File "./controlsd.py", line 455, in controlsd_thread
|
||||
1/0
|
||||
ZeroDivisionError: division by zero"""
|
||||
print(text)
|
||||
|
||||
with TextWindow(text) as s:
|
||||
for _ in range(100):
|
||||
if s.get_status() == 1:
|
||||
print("Got exit button")
|
||||
break
|
||||
time.sleep(0.1)
|
||||
print("gone")
|
||||
6
common/time.py
Normal file
6
common/time.py
Normal file
@@ -0,0 +1,6 @@
|
||||
import datetime
|
||||
|
||||
MIN_DATE = datetime.datetime(year=2025, month=1, day=1)
|
||||
|
||||
def system_time_valid():
|
||||
return datetime.datetime.now() > MIN_DATE
|
||||
27
common/timeout.py
Normal file
27
common/timeout.py
Normal file
@@ -0,0 +1,27 @@
|
||||
import signal
|
||||
|
||||
class TimeoutException(Exception):
|
||||
pass
|
||||
|
||||
class Timeout:
|
||||
"""
|
||||
Timeout context manager.
|
||||
For example this code will raise a TimeoutException:
|
||||
with Timeout(seconds=5, error_msg="Sleep was too long"):
|
||||
time.sleep(10)
|
||||
"""
|
||||
def __init__(self, seconds, error_msg=None):
|
||||
if error_msg is None:
|
||||
error_msg = f'Timed out after {seconds} seconds'
|
||||
self.seconds = seconds
|
||||
self.error_msg = error_msg
|
||||
|
||||
def handle_timeout(self, signume, frame):
|
||||
raise TimeoutException(self.error_msg)
|
||||
|
||||
def __enter__(self):
|
||||
signal.signal(signal.SIGALRM, self.handle_timeout)
|
||||
signal.alarm(self.seconds)
|
||||
|
||||
def __exit__(self, exc_type, exc_val, exc_tb):
|
||||
signal.alarm(0)
|
||||
51
common/timing.h
Normal file
51
common/timing.h
Normal file
@@ -0,0 +1,51 @@
|
||||
#pragma once
|
||||
|
||||
#include <cstdint>
|
||||
#include <ctime>
|
||||
|
||||
#ifdef __APPLE__
|
||||
#define CLOCK_BOOTTIME CLOCK_MONOTONIC
|
||||
#endif
|
||||
|
||||
static inline uint64_t nanos_since_boot() {
|
||||
struct timespec t;
|
||||
clock_gettime(CLOCK_BOOTTIME, &t);
|
||||
return t.tv_sec * 1000000000ULL + t.tv_nsec;
|
||||
}
|
||||
|
||||
static inline double millis_since_boot() {
|
||||
struct timespec t;
|
||||
clock_gettime(CLOCK_BOOTTIME, &t);
|
||||
return t.tv_sec * 1000.0 + t.tv_nsec * 1e-6;
|
||||
}
|
||||
|
||||
static inline double seconds_since_boot() {
|
||||
struct timespec t;
|
||||
clock_gettime(CLOCK_BOOTTIME, &t);
|
||||
return (double)t.tv_sec + t.tv_nsec * 1e-9;
|
||||
}
|
||||
|
||||
static inline uint64_t nanos_since_epoch() {
|
||||
struct timespec t;
|
||||
clock_gettime(CLOCK_REALTIME, &t);
|
||||
return t.tv_sec * 1000000000ULL + t.tv_nsec;
|
||||
}
|
||||
|
||||
static inline double seconds_since_epoch() {
|
||||
struct timespec t;
|
||||
clock_gettime(CLOCK_REALTIME, &t);
|
||||
return (double)t.tv_sec + t.tv_nsec * 1e-9;
|
||||
}
|
||||
|
||||
// you probably should use nanos_since_boot instead
|
||||
static inline uint64_t nanos_monotonic() {
|
||||
struct timespec t;
|
||||
clock_gettime(CLOCK_MONOTONIC, &t);
|
||||
return t.tv_sec * 1000000000ULL + t.tv_nsec;
|
||||
}
|
||||
|
||||
static inline uint64_t nanos_monotonic_raw() {
|
||||
struct timespec t;
|
||||
clock_gettime(CLOCK_MONOTONIC_RAW, &t);
|
||||
return t.tv_sec * 1000000000ULL + t.tv_nsec;
|
||||
}
|
||||
70
common/transformations/README.md
Normal file
70
common/transformations/README.md
Normal file
@@ -0,0 +1,70 @@
|
||||
|
||||
Reference Frames
|
||||
------
|
||||
Many reference frames are used throughout. This
|
||||
folder contains all helper functions needed to
|
||||
transform between them. Generally this is done
|
||||
by generating a rotation matrix and multiplying.
|
||||
|
||||
|
||||
| Name | [x, y, z] | Units | Notes |
|
||||
| :-------------: |:-------------:| :-----:| :----: |
|
||||
| Geodetic | [Latitude, Longitude, Altitude] | geodetic coordinates | Sometimes used as [lon, lat, alt], avoid this frame. |
|
||||
| ECEF | [x, y, z] | meters | We use **ITRF14 (IGS14)**, NOT NAD83. <br> This is the global Mesh3D frame. |
|
||||
| NED | [North, East, Down] | meters | Relative to earth's surface, useful for vizualizing. |
|
||||
| Device | [Forward, Right, Down] | meters | This is the Mesh3D local frame. <br> Relative to camera, **not imu.** <br> 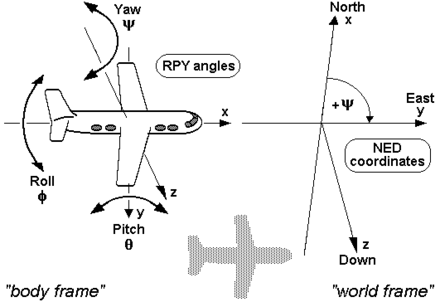|
|
||||
| Calibrated | [Forward, Right, Down] | meters | This is the frame the model outputs are in. <br> More details below. <br>|
|
||||
| Car | [Forward, Right, Down] | meters | This is useful for estimating position of points on the road. <br> More details below. <br>|
|
||||
| View | [Right, Down, Forward] | meters | Like device frame, but according to camera conventions. |
|
||||
| Camera | [u, v, focal] | pixels | Like view frame, but 2d on the camera image.|
|
||||
| Normalized Camera | [u / focal, v / focal, 1] | / | |
|
||||
| Model | [u, v, focal] | pixels | The sampled rectangle of the full camera frame the model uses. |
|
||||
| Normalized Model | [u / focal, v / focal, 1] | / | |
|
||||
|
||||
|
||||
|
||||
|
||||
Orientation Conventions
|
||||
------
|
||||
Quaternions, rotation matrices and euler angles are three
|
||||
equivalent representations of orientation and all three are
|
||||
used throughout the code base.
|
||||
|
||||
For euler angles the preferred convention is [roll, pitch, yaw]
|
||||
which corresponds to rotations around the [x, y, z] axes. All
|
||||
euler angles should always be in radians or radians/s unless
|
||||
for plotting or display purposes. For quaternions the hamilton
|
||||
notations is preferred which is [q<sub>w</sub>, q<sub>x</sub>, q<sub>y</sub>, q<sub>z</sub>]. All quaternions
|
||||
should always be normalized with a strictly positive q<sub>w</sub>. **These
|
||||
quaternions are a unique representation of orientation whereas euler angles
|
||||
or rotation matrices are not.**
|
||||
|
||||
To rotate from one frame into another with euler angles the
|
||||
convention is to rotate around roll, then pitch and then yaw,
|
||||
while rotating around the rotated axes, not the original axes.
|
||||
|
||||
|
||||
Car frame
|
||||
------
|
||||
Device frame is aligned with the road-facing camera used by openpilot. However, when controlling the vehicle it is helpful to think in a reference frame aligned with the vehicle. These two reference frames can be different.
|
||||
|
||||
The orientation of car frame is defined to be aligned with the car's direction of travel and the road plane when the vehicle is driving on a flat road and not turning. The origin of car frame is defined to be directly below device frame (in car frame), such that it is on the road plane. The position and orientation of this frame is not necessarily always aligned with the direction of travel or the road plane due to suspension movements and other effects.
|
||||
|
||||
|
||||
Calibrated frame
|
||||
------
|
||||
It is helpful for openpilot's driving model to take in images that look similar when mounted differently in different cars. To achieve this we "calibrate" the images by transforming it into calibrated frame. Calibrated frame is defined to be aligned with car frame in pitch and yaw, and aligned with device frame in roll. It also has the same origin as device frame.
|
||||
|
||||
|
||||
Example
|
||||
------
|
||||
To transform global Mesh3D positions and orientations (positions_ecef, quats_ecef) into the local frame described by the
|
||||
first position and orientation from Mesh3D one would do:
|
||||
```
|
||||
ecef_from_local = rot_from_quat(quats_ecef[0])
|
||||
local_from_ecef = ecef_from_local.T
|
||||
positions_local = np.einsum('ij,kj->ki', local_from_ecef, postions_ecef - positions_ecef[0])
|
||||
rotations_global = rot_from_quat(quats_ecef)
|
||||
rotations_local = np.einsum('ij,kjl->kil', local_from_ecef, rotations_global)
|
||||
eulers_local = euler_from_rot(rotations_local)
|
||||
```
|
||||
0
common/transformations/__init__.py
Normal file
0
common/transformations/__init__.py
Normal file
160
common/transformations/camera.py
Normal file
160
common/transformations/camera.py
Normal file
@@ -0,0 +1,160 @@
|
||||
import numpy as np
|
||||
|
||||
import openpilot.common.transformations.orientation as orient
|
||||
|
||||
## -- hardcoded hardware params --
|
||||
eon_f_focal_length = 910.0
|
||||
eon_d_focal_length = 650.0
|
||||
tici_f_focal_length = 2648.0
|
||||
tici_e_focal_length = tici_d_focal_length = 567.0 # probably wrong? magnification is not consistent across frame
|
||||
|
||||
eon_f_frame_size = (1164, 874)
|
||||
eon_d_frame_size = (816, 612)
|
||||
tici_f_frame_size = tici_e_frame_size = tici_d_frame_size = (1928, 1208)
|
||||
|
||||
# aka 'K' aka camera_frame_from_view_frame
|
||||
eon_fcam_intrinsics = np.array([
|
||||
[eon_f_focal_length, 0.0, float(eon_f_frame_size[0])/2],
|
||||
[0.0, eon_f_focal_length, float(eon_f_frame_size[1])/2],
|
||||
[0.0, 0.0, 1.0]])
|
||||
eon_intrinsics = eon_fcam_intrinsics # xx
|
||||
|
||||
eon_dcam_intrinsics = np.array([
|
||||
[eon_d_focal_length, 0.0, float(eon_d_frame_size[0])/2],
|
||||
[0.0, eon_d_focal_length, float(eon_d_frame_size[1])/2],
|
||||
[0.0, 0.0, 1.0]])
|
||||
|
||||
tici_fcam_intrinsics = np.array([
|
||||
[tici_f_focal_length, 0.0, float(tici_f_frame_size[0])/2],
|
||||
[0.0, tici_f_focal_length, float(tici_f_frame_size[1])/2],
|
||||
[0.0, 0.0, 1.0]])
|
||||
|
||||
tici_dcam_intrinsics = np.array([
|
||||
[tici_d_focal_length, 0.0, float(tici_d_frame_size[0])/2],
|
||||
[0.0, tici_d_focal_length, float(tici_d_frame_size[1])/2],
|
||||
[0.0, 0.0, 1.0]])
|
||||
|
||||
tici_ecam_intrinsics = tici_dcam_intrinsics
|
||||
|
||||
# aka 'K_inv' aka view_frame_from_camera_frame
|
||||
eon_fcam_intrinsics_inv = np.linalg.inv(eon_fcam_intrinsics)
|
||||
eon_intrinsics_inv = eon_fcam_intrinsics_inv # xx
|
||||
|
||||
tici_fcam_intrinsics_inv = np.linalg.inv(tici_fcam_intrinsics)
|
||||
tici_ecam_intrinsics_inv = np.linalg.inv(tici_ecam_intrinsics)
|
||||
|
||||
|
||||
FULL_FRAME_SIZE = tici_f_frame_size
|
||||
FOCAL = tici_f_focal_length
|
||||
fcam_intrinsics = tici_fcam_intrinsics
|
||||
|
||||
W, H = FULL_FRAME_SIZE[0], FULL_FRAME_SIZE[1]
|
||||
|
||||
|
||||
# device/mesh : x->forward, y-> right, z->down
|
||||
# view : x->right, y->down, z->forward
|
||||
device_frame_from_view_frame = np.array([
|
||||
[ 0., 0., 1.],
|
||||
[ 1., 0., 0.],
|
||||
[ 0., 1., 0.]
|
||||
])
|
||||
view_frame_from_device_frame = device_frame_from_view_frame.T
|
||||
|
||||
|
||||
# aka 'extrinsic_matrix'
|
||||
# road : x->forward, y -> left, z->up
|
||||
def get_view_frame_from_road_frame(roll, pitch, yaw, height):
|
||||
device_from_road = orient.rot_from_euler([roll, pitch, yaw]).dot(np.diag([1, -1, -1]))
|
||||
view_from_road = view_frame_from_device_frame.dot(device_from_road)
|
||||
return np.hstack((view_from_road, [[0], [height], [0]]))
|
||||
|
||||
|
||||
|
||||
# aka 'extrinsic_matrix'
|
||||
def get_view_frame_from_calib_frame(roll, pitch, yaw, height):
|
||||
device_from_calib= orient.rot_from_euler([roll, pitch, yaw])
|
||||
view_from_calib = view_frame_from_device_frame.dot(device_from_calib)
|
||||
return np.hstack((view_from_calib, [[0], [height], [0]]))
|
||||
|
||||
|
||||
def vp_from_ke(m):
|
||||
"""
|
||||
Computes the vanishing point from the product of the intrinsic and extrinsic
|
||||
matrices C = KE.
|
||||
|
||||
The vanishing point is defined as lim x->infinity C (x, 0, 0, 1).T
|
||||
"""
|
||||
return (m[0, 0]/m[2, 0], m[1, 0]/m[2, 0])
|
||||
|
||||
|
||||
def roll_from_ke(m):
|
||||
# note: different from calibration.h/RollAnglefromKE: i think that one's just wrong
|
||||
return np.arctan2(-(m[1, 0] - m[1, 1] * m[2, 0] / m[2, 1]),
|
||||
-(m[0, 0] - m[0, 1] * m[2, 0] / m[2, 1]))
|
||||
|
||||
|
||||
def normalize(img_pts, intrinsics=fcam_intrinsics):
|
||||
# normalizes image coordinates
|
||||
# accepts single pt or array of pts
|
||||
intrinsics_inv = np.linalg.inv(intrinsics)
|
||||
img_pts = np.array(img_pts)
|
||||
input_shape = img_pts.shape
|
||||
img_pts = np.atleast_2d(img_pts)
|
||||
img_pts = np.hstack((img_pts, np.ones((img_pts.shape[0], 1))))
|
||||
img_pts_normalized = img_pts.dot(intrinsics_inv.T)
|
||||
img_pts_normalized[(img_pts < 0).any(axis=1)] = np.nan
|
||||
return img_pts_normalized[:, :2].reshape(input_shape)
|
||||
|
||||
|
||||
def denormalize(img_pts, intrinsics=fcam_intrinsics, width=np.inf, height=np.inf):
|
||||
# denormalizes image coordinates
|
||||
# accepts single pt or array of pts
|
||||
img_pts = np.array(img_pts)
|
||||
input_shape = img_pts.shape
|
||||
img_pts = np.atleast_2d(img_pts)
|
||||
img_pts = np.hstack((img_pts, np.ones((img_pts.shape[0], 1), dtype=img_pts.dtype)))
|
||||
img_pts_denormalized = img_pts.dot(intrinsics.T)
|
||||
if np.isfinite(width):
|
||||
img_pts_denormalized[img_pts_denormalized[:, 0] > width] = np.nan
|
||||
img_pts_denormalized[img_pts_denormalized[:, 0] < 0] = np.nan
|
||||
if np.isfinite(height):
|
||||
img_pts_denormalized[img_pts_denormalized[:, 1] > height] = np.nan
|
||||
img_pts_denormalized[img_pts_denormalized[:, 1] < 0] = np.nan
|
||||
return img_pts_denormalized[:, :2].reshape(input_shape)
|
||||
|
||||
|
||||
def get_calib_from_vp(vp, intrinsics=fcam_intrinsics):
|
||||
vp_norm = normalize(vp, intrinsics)
|
||||
yaw_calib = np.arctan(vp_norm[0])
|
||||
pitch_calib = -np.arctan(vp_norm[1]*np.cos(yaw_calib))
|
||||
roll_calib = 0
|
||||
return roll_calib, pitch_calib, yaw_calib
|
||||
|
||||
|
||||
def device_from_ecef(pos_ecef, orientation_ecef, pt_ecef):
|
||||
# device from ecef frame
|
||||
# device frame is x -> forward, y-> right, z -> down
|
||||
# accepts single pt or array of pts
|
||||
input_shape = pt_ecef.shape
|
||||
pt_ecef = np.atleast_2d(pt_ecef)
|
||||
ecef_from_device_rot = orient.rotations_from_quats(orientation_ecef)
|
||||
device_from_ecef_rot = ecef_from_device_rot.T
|
||||
pt_ecef_rel = pt_ecef - pos_ecef
|
||||
pt_device = np.einsum('jk,ik->ij', device_from_ecef_rot, pt_ecef_rel)
|
||||
return pt_device.reshape(input_shape)
|
||||
|
||||
|
||||
def img_from_device(pt_device):
|
||||
# img coordinates from pts in device frame
|
||||
# first transforms to view frame, then to img coords
|
||||
# accepts single pt or array of pts
|
||||
input_shape = pt_device.shape
|
||||
pt_device = np.atleast_2d(pt_device)
|
||||
pt_view = np.einsum('jk,ik->ij', view_frame_from_device_frame, pt_device)
|
||||
|
||||
# This function should never return negative depths
|
||||
pt_view[pt_view[:, 2] < 0] = np.nan
|
||||
|
||||
pt_img = pt_view/pt_view[:, 2:3]
|
||||
return pt_img.reshape(input_shape)[:, :2]
|
||||
|
||||
41
common/transformations/coordinates.hpp
Normal file
41
common/transformations/coordinates.hpp
Normal file
@@ -0,0 +1,41 @@
|
||||
#pragma once
|
||||
|
||||
#define DEG2RAD(x) ((x) * M_PI / 180.0)
|
||||
#define RAD2DEG(x) ((x) * 180.0 / M_PI)
|
||||
|
||||
struct ECEF {
|
||||
double x, y, z;
|
||||
Eigen::Vector3d to_vector(){
|
||||
return Eigen::Vector3d(x, y, z);
|
||||
}
|
||||
};
|
||||
|
||||
struct NED {
|
||||
double n, e, d;
|
||||
Eigen::Vector3d to_vector(){
|
||||
return Eigen::Vector3d(n, e, d);
|
||||
}
|
||||
};
|
||||
|
||||
struct Geodetic {
|
||||
double lat, lon, alt;
|
||||
bool radians=false;
|
||||
};
|
||||
|
||||
ECEF geodetic2ecef(Geodetic g);
|
||||
Geodetic ecef2geodetic(ECEF e);
|
||||
|
||||
class LocalCoord {
|
||||
public:
|
||||
Eigen::Matrix3d ned2ecef_matrix;
|
||||
Eigen::Matrix3d ecef2ned_matrix;
|
||||
Eigen::Vector3d init_ecef;
|
||||
LocalCoord(Geodetic g, ECEF e);
|
||||
LocalCoord(Geodetic g) : LocalCoord(g, ::geodetic2ecef(g)) {}
|
||||
LocalCoord(ECEF e) : LocalCoord(::ecef2geodetic(e), e) {}
|
||||
|
||||
NED ecef2ned(ECEF e);
|
||||
ECEF ned2ecef(NED n);
|
||||
NED geodetic2ned(Geodetic g);
|
||||
Geodetic ned2geodetic(NED n);
|
||||
};
|
||||
19
common/transformations/coordinates.py
Normal file
19
common/transformations/coordinates.py
Normal file
@@ -0,0 +1,19 @@
|
||||
# pylint: skip-file
|
||||
from openpilot.common.transformations.orientation import numpy_wrap
|
||||
from openpilot.common.transformations.transformations import (ecef2geodetic_single,
|
||||
geodetic2ecef_single)
|
||||
from openpilot.common.transformations.transformations import LocalCoord as LocalCoord_single
|
||||
|
||||
|
||||
class LocalCoord(LocalCoord_single):
|
||||
ecef2ned = numpy_wrap(LocalCoord_single.ecef2ned_single, (3,), (3,))
|
||||
ned2ecef = numpy_wrap(LocalCoord_single.ned2ecef_single, (3,), (3,))
|
||||
geodetic2ned = numpy_wrap(LocalCoord_single.geodetic2ned_single, (3,), (3,))
|
||||
ned2geodetic = numpy_wrap(LocalCoord_single.ned2geodetic_single, (3,), (3,))
|
||||
|
||||
|
||||
geodetic2ecef = numpy_wrap(geodetic2ecef_single, (3,), (3,))
|
||||
ecef2geodetic = numpy_wrap(ecef2geodetic_single, (3,), (3,))
|
||||
|
||||
geodetic_from_ecef = ecef2geodetic
|
||||
ecef_from_geodetic = geodetic2ecef
|
||||
117
common/transformations/model.py
Normal file
117
common/transformations/model.py
Normal file
@@ -0,0 +1,117 @@
|
||||
import numpy as np
|
||||
|
||||
from openpilot.common.transformations.camera import (FULL_FRAME_SIZE,
|
||||
get_view_frame_from_calib_frame)
|
||||
|
||||
# segnet
|
||||
SEGNET_SIZE = (512, 384)
|
||||
|
||||
def get_segnet_frame_from_camera_frame(segnet_size=SEGNET_SIZE, full_frame_size=FULL_FRAME_SIZE):
|
||||
return np.array([[float(segnet_size[0]) / full_frame_size[0], 0.0],
|
||||
[0.0, float(segnet_size[1]) / full_frame_size[1]]])
|
||||
segnet_frame_from_camera_frame = get_segnet_frame_from_camera_frame() # xx
|
||||
|
||||
|
||||
# MED model
|
||||
MEDMODEL_INPUT_SIZE = (512, 256)
|
||||
MEDMODEL_YUV_SIZE = (MEDMODEL_INPUT_SIZE[0], MEDMODEL_INPUT_SIZE[1] * 3 // 2)
|
||||
MEDMODEL_CY = 47.6
|
||||
|
||||
medmodel_fl = 910.0
|
||||
medmodel_intrinsics = np.array([
|
||||
[medmodel_fl, 0.0, 0.5 * MEDMODEL_INPUT_SIZE[0]],
|
||||
[0.0, medmodel_fl, MEDMODEL_CY],
|
||||
[0.0, 0.0, 1.0]])
|
||||
|
||||
|
||||
# BIG model
|
||||
BIGMODEL_INPUT_SIZE = (1024, 512)
|
||||
BIGMODEL_YUV_SIZE = (BIGMODEL_INPUT_SIZE[0], BIGMODEL_INPUT_SIZE[1] * 3 // 2)
|
||||
|
||||
bigmodel_fl = 910.0
|
||||
bigmodel_intrinsics = np.array([
|
||||
[bigmodel_fl, 0.0, 0.5 * BIGMODEL_INPUT_SIZE[0]],
|
||||
[0.0, bigmodel_fl, 256 + MEDMODEL_CY],
|
||||
[0.0, 0.0, 1.0]])
|
||||
|
||||
|
||||
# SBIG model (big model with the size of small model)
|
||||
SBIGMODEL_INPUT_SIZE = (512, 256)
|
||||
SBIGMODEL_YUV_SIZE = (SBIGMODEL_INPUT_SIZE[0], SBIGMODEL_INPUT_SIZE[1] * 3 // 2)
|
||||
|
||||
sbigmodel_fl = 455.0
|
||||
sbigmodel_intrinsics = np.array([
|
||||
[sbigmodel_fl, 0.0, 0.5 * SBIGMODEL_INPUT_SIZE[0]],
|
||||
[0.0, sbigmodel_fl, 0.5 * (256 + MEDMODEL_CY)],
|
||||
[0.0, 0.0, 1.0]])
|
||||
|
||||
bigmodel_frame_from_calib_frame = np.dot(bigmodel_intrinsics,
|
||||
get_view_frame_from_calib_frame(0, 0, 0, 0))
|
||||
|
||||
|
||||
sbigmodel_frame_from_calib_frame = np.dot(sbigmodel_intrinsics,
|
||||
get_view_frame_from_calib_frame(0, 0, 0, 0))
|
||||
|
||||
medmodel_frame_from_calib_frame = np.dot(medmodel_intrinsics,
|
||||
get_view_frame_from_calib_frame(0, 0, 0, 0))
|
||||
|
||||
medmodel_frame_from_bigmodel_frame = np.dot(medmodel_intrinsics, np.linalg.inv(bigmodel_intrinsics))
|
||||
|
||||
|
||||
### This function mimics the update_calibration logic in modeld.cc
|
||||
### Manually verified to give similar results to xx.uncommon.utils.transform_img
|
||||
def get_warp_matrix(rpy_calib, wide_cam=False, big_model=False, tici=True):
|
||||
from openpilot.common.transformations.orientation import rot_from_euler
|
||||
from openpilot.common.transformations.camera import view_frame_from_device_frame, eon_fcam_intrinsics, tici_ecam_intrinsics, tici_fcam_intrinsics
|
||||
|
||||
if tici and wide_cam:
|
||||
intrinsics = tici_ecam_intrinsics
|
||||
elif tici:
|
||||
intrinsics = tici_fcam_intrinsics
|
||||
else:
|
||||
intrinsics = eon_fcam_intrinsics
|
||||
|
||||
if big_model:
|
||||
sbigmodel_from_calib = sbigmodel_frame_from_calib_frame[:, (0,1,2)]
|
||||
calib_from_model = np.linalg.inv(sbigmodel_from_calib)
|
||||
else:
|
||||
medmodel_from_calib = medmodel_frame_from_calib_frame[:, (0,1,2)]
|
||||
calib_from_model = np.linalg.inv(medmodel_from_calib)
|
||||
device_from_calib = rot_from_euler(rpy_calib)
|
||||
camera_from_calib = intrinsics.dot(view_frame_from_device_frame.dot(device_from_calib))
|
||||
warp_matrix = camera_from_calib.dot(calib_from_model)
|
||||
return warp_matrix
|
||||
|
||||
|
||||
### This is old, just for debugging
|
||||
def get_warp_matrix_old(rpy_calib, wide_cam=False, big_model=False, tici=True):
|
||||
from openpilot.common.transformations.orientation import rot_from_euler
|
||||
from openpilot.common.transformations.camera import view_frame_from_device_frame, eon_fcam_intrinsics, tici_ecam_intrinsics, tici_fcam_intrinsics
|
||||
|
||||
|
||||
def get_view_frame_from_road_frame(roll, pitch, yaw, height):
|
||||
device_from_road = rot_from_euler([roll, pitch, yaw]).dot(np.diag([1, -1, -1]))
|
||||
view_from_road = view_frame_from_device_frame.dot(device_from_road)
|
||||
return np.hstack((view_from_road, [[0], [height], [0]]))
|
||||
|
||||
if tici and wide_cam:
|
||||
intrinsics = tici_ecam_intrinsics
|
||||
elif tici:
|
||||
intrinsics = tici_fcam_intrinsics
|
||||
else:
|
||||
intrinsics = eon_fcam_intrinsics
|
||||
|
||||
model_height = 1.22
|
||||
if big_model:
|
||||
model_from_road = np.dot(sbigmodel_intrinsics,
|
||||
get_view_frame_from_road_frame(0, 0, 0, model_height))
|
||||
else:
|
||||
model_from_road = np.dot(medmodel_intrinsics,
|
||||
get_view_frame_from_road_frame(0, 0, 0, model_height))
|
||||
ground_from_model = np.linalg.inv(model_from_road[:, (0, 1, 3)])
|
||||
|
||||
E = get_view_frame_from_road_frame(*rpy_calib, 1.22)
|
||||
camera_frame_from_road_frame = intrinsics.dot(E)
|
||||
camera_frame_from_ground = camera_frame_from_road_frame[:,(0,1,3)]
|
||||
warp_matrix = camera_frame_from_ground .dot(ground_from_model)
|
||||
return warp_matrix
|
||||
17
common/transformations/orientation.hpp
Normal file
17
common/transformations/orientation.hpp
Normal file
@@ -0,0 +1,17 @@
|
||||
#pragma once
|
||||
#include <eigen3/Eigen/Dense>
|
||||
#include "coordinates.hpp"
|
||||
|
||||
|
||||
Eigen::Quaterniond ensure_unique(Eigen::Quaterniond quat);
|
||||
|
||||
Eigen::Quaterniond euler2quat(Eigen::Vector3d euler);
|
||||
Eigen::Vector3d quat2euler(Eigen::Quaterniond quat);
|
||||
Eigen::Matrix3d quat2rot(Eigen::Quaterniond quat);
|
||||
Eigen::Quaterniond rot2quat(const Eigen::Matrix3d &rot);
|
||||
Eigen::Matrix3d euler2rot(Eigen::Vector3d euler);
|
||||
Eigen::Vector3d rot2euler(const Eigen::Matrix3d &rot);
|
||||
Eigen::Matrix3d rot_matrix(double roll, double pitch, double yaw);
|
||||
Eigen::Matrix3d rot(Eigen::Vector3d axis, double angle);
|
||||
Eigen::Vector3d ecef_euler_from_ned(ECEF ecef_init, Eigen::Vector3d ned_pose);
|
||||
Eigen::Vector3d ned_euler_from_ecef(ECEF ecef_init, Eigen::Vector3d ecef_pose);
|
||||
53
common/transformations/orientation.py
Normal file
53
common/transformations/orientation.py
Normal file
@@ -0,0 +1,53 @@
|
||||
# pylint: skip-file
|
||||
import numpy as np
|
||||
from typing import Callable
|
||||
|
||||
from openpilot.common.transformations.transformations import (ecef_euler_from_ned_single,
|
||||
euler2quat_single,
|
||||
euler2rot_single,
|
||||
ned_euler_from_ecef_single,
|
||||
quat2euler_single,
|
||||
quat2rot_single,
|
||||
rot2euler_single,
|
||||
rot2quat_single)
|
||||
|
||||
|
||||
def numpy_wrap(function, input_shape, output_shape) -> Callable[..., np.ndarray]:
|
||||
"""Wrap a function to take either an input or list of inputs and return the correct shape"""
|
||||
def f(*inps):
|
||||
*args, inp = inps
|
||||
inp = np.array(inp)
|
||||
shape = inp.shape
|
||||
|
||||
if len(shape) == len(input_shape):
|
||||
out_shape = output_shape
|
||||
else:
|
||||
out_shape = (shape[0],) + output_shape
|
||||
|
||||
# Add empty dimension if inputs is not a list
|
||||
if len(shape) == len(input_shape):
|
||||
inp.shape = (1, ) + inp.shape
|
||||
|
||||
result = np.asarray([function(*args, i) for i in inp])
|
||||
result.shape = out_shape
|
||||
return result
|
||||
return f
|
||||
|
||||
|
||||
euler2quat = numpy_wrap(euler2quat_single, (3,), (4,))
|
||||
quat2euler = numpy_wrap(quat2euler_single, (4,), (3,))
|
||||
quat2rot = numpy_wrap(quat2rot_single, (4,), (3, 3))
|
||||
rot2quat = numpy_wrap(rot2quat_single, (3, 3), (4,))
|
||||
euler2rot = numpy_wrap(euler2rot_single, (3,), (3, 3))
|
||||
rot2euler = numpy_wrap(rot2euler_single, (3, 3), (3,))
|
||||
ecef_euler_from_ned = numpy_wrap(ecef_euler_from_ned_single, (3,), (3,))
|
||||
ned_euler_from_ecef = numpy_wrap(ned_euler_from_ecef_single, (3,), (3,))
|
||||
|
||||
quats_from_rotations = rot2quat
|
||||
quat_from_rot = rot2quat
|
||||
rotations_from_quats = quat2rot
|
||||
rot_from_quat = quat2rot
|
||||
euler_from_rot = rot2euler
|
||||
euler_from_quat = quat2euler
|
||||
rot_from_euler = euler2rot
|
||||
quat_from_euler = euler2quat
|
||||
0
common/transformations/tests/__init__.py
Normal file
0
common/transformations/tests/__init__.py
Normal file
109
common/transformations/tests/test_coordinates.py
Executable file
109
common/transformations/tests/test_coordinates.py
Executable file
@@ -0,0 +1,109 @@
|
||||
#!/usr/bin/env python3
|
||||
|
||||
import numpy as np
|
||||
import unittest
|
||||
|
||||
import openpilot.common.transformations.coordinates as coord
|
||||
|
||||
geodetic_positions = np.array([[37.7610403, -122.4778699, 115],
|
||||
[27.4840915, -68.5867592, 2380],
|
||||
[32.4916858, -113.652821, -6],
|
||||
[15.1392514, 103.6976037, 24],
|
||||
[24.2302229, 44.2835412, 1650]])
|
||||
|
||||
ecef_positions = np.array([[-2711076.55270557, -4259167.14692758, 3884579.87669935],
|
||||
[ 2068042.69652729, -5273435.40316622, 2927004.89190746],
|
||||
[-2160412.60461669, -4932588.89873832, 3406542.29652851],
|
||||
[-1458247.92550567, 5983060.87496612, 1654984.6099885 ],
|
||||
[ 4167239.10867871, 4064301.90363223, 2602234.6065749 ]])
|
||||
|
||||
ecef_positions_offset = np.array([[-2711004.46961115, -4259099.33540613, 3884605.16002147],
|
||||
[ 2068074.30639499, -5273413.78835412, 2927012.48741131],
|
||||
[-2160344.53748176, -4932586.20092211, 3406636.2962545 ],
|
||||
[-1458211.98517094, 5983151.11161276, 1655077.02698447],
|
||||
[ 4167271.20055269, 4064398.22619263, 2602238.95265847]])
|
||||
|
||||
|
||||
ned_offsets = np.array([[78.722153649976391, 24.396208657446344, 60.343017506838436],
|
||||
[10.699003365155221, 37.319278617604269, 4.1084100025050407],
|
||||
[95.282646251726959, 61.266689955574428, -25.376506058505054],
|
||||
[68.535769283630003, -56.285970011848889, -100.54840137956515],
|
||||
[-33.066609321880179, 46.549821994306861, -84.062540548335591]])
|
||||
|
||||
ecef_init_batch = np.array([2068042.69652729, -5273435.40316622, 2927004.89190746])
|
||||
ecef_positions_offset_batch = np.array([[ 2068089.41454771, -5273434.46829148, 2927074.04783672],
|
||||
[ 2068103.31628647, -5273393.92275431, 2927102.08725987],
|
||||
[ 2068108.49939636, -5273359.27047121, 2927045.07091581],
|
||||
[ 2068075.12395611, -5273381.69432566, 2927041.08207992],
|
||||
[ 2068060.72033399, -5273430.6061505, 2927094.54928305]])
|
||||
|
||||
ned_offsets_batch = np.array([[ 53.88103168, 43.83445935, -46.27488057],
|
||||
[ 93.83378995, 71.57943024, -30.23113187],
|
||||
[ 57.26725796, 89.05602684, 23.02265814],
|
||||
[ 49.71775195, 49.79767572, 17.15351015],
|
||||
[ 78.56272609, 18.53100158, -43.25290759]])
|
||||
|
||||
|
||||
class TestNED(unittest.TestCase):
|
||||
def test_small_distances(self):
|
||||
start_geodetic = np.array([33.8042184, -117.888593, 0.0])
|
||||
local_coord = coord.LocalCoord.from_geodetic(start_geodetic)
|
||||
|
||||
start_ned = local_coord.geodetic2ned(start_geodetic)
|
||||
np.testing.assert_array_equal(start_ned, np.zeros(3,))
|
||||
|
||||
west_geodetic = start_geodetic + [0, -0.0005, 0]
|
||||
west_ned = local_coord.geodetic2ned(west_geodetic)
|
||||
self.assertLess(np.abs(west_ned[0]), 1e-3)
|
||||
self.assertLess(west_ned[1], 0)
|
||||
|
||||
southwest_geodetic = start_geodetic + [-0.0005, -0.002, 0]
|
||||
southwest_ned = local_coord.geodetic2ned(southwest_geodetic)
|
||||
self.assertLess(southwest_ned[0], 0)
|
||||
self.assertLess(southwest_ned[1], 0)
|
||||
|
||||
def test_ecef_geodetic(self):
|
||||
# testing single
|
||||
np.testing.assert_allclose(ecef_positions[0], coord.geodetic2ecef(geodetic_positions[0]), rtol=1e-9)
|
||||
np.testing.assert_allclose(geodetic_positions[0, :2], coord.ecef2geodetic(ecef_positions[0])[:2], rtol=1e-9)
|
||||
np.testing.assert_allclose(geodetic_positions[0, 2], coord.ecef2geodetic(ecef_positions[0])[2], rtol=1e-9, atol=1e-4)
|
||||
|
||||
np.testing.assert_allclose(geodetic_positions[:, :2], coord.ecef2geodetic(ecef_positions)[:, :2], rtol=1e-9)
|
||||
np.testing.assert_allclose(geodetic_positions[:, 2], coord.ecef2geodetic(ecef_positions)[:, 2], rtol=1e-9, atol=1e-4)
|
||||
np.testing.assert_allclose(ecef_positions, coord.geodetic2ecef(geodetic_positions), rtol=1e-9)
|
||||
|
||||
|
||||
def test_ned(self):
|
||||
for ecef_pos in ecef_positions:
|
||||
converter = coord.LocalCoord.from_ecef(ecef_pos)
|
||||
ecef_pos_moved = ecef_pos + [25, -25, 25]
|
||||
ecef_pos_moved_double_converted = converter.ned2ecef(converter.ecef2ned(ecef_pos_moved))
|
||||
np.testing.assert_allclose(ecef_pos_moved, ecef_pos_moved_double_converted, rtol=1e-9)
|
||||
|
||||
for geo_pos in geodetic_positions:
|
||||
converter = coord.LocalCoord.from_geodetic(geo_pos)
|
||||
geo_pos_moved = geo_pos + np.array([0, 0, 10])
|
||||
geo_pos_double_converted_moved = converter.ned2geodetic(converter.geodetic2ned(geo_pos) + np.array([0, 0, -10]))
|
||||
np.testing.assert_allclose(geo_pos_moved[:2], geo_pos_double_converted_moved[:2], rtol=1e-9, atol=1e-6)
|
||||
np.testing.assert_allclose(geo_pos_moved[2], geo_pos_double_converted_moved[2], rtol=1e-9, atol=1e-4)
|
||||
|
||||
def test_ned_saved_results(self):
|
||||
for i, ecef_pos in enumerate(ecef_positions):
|
||||
converter = coord.LocalCoord.from_ecef(ecef_pos)
|
||||
np.testing.assert_allclose(converter.ned2ecef(ned_offsets[i]),
|
||||
ecef_positions_offset[i],
|
||||
rtol=1e-9, atol=1e-4)
|
||||
np.testing.assert_allclose(converter.ecef2ned(ecef_positions_offset[i]),
|
||||
ned_offsets[i],
|
||||
rtol=1e-9, atol=1e-4)
|
||||
|
||||
def test_ned_batch(self):
|
||||
converter = coord.LocalCoord.from_ecef(ecef_init_batch)
|
||||
np.testing.assert_allclose(converter.ecef2ned(ecef_positions_offset_batch),
|
||||
ned_offsets_batch,
|
||||
rtol=1e-9, atol=1e-7)
|
||||
np.testing.assert_allclose(converter.ned2ecef(ned_offsets_batch),
|
||||
ecef_positions_offset_batch,
|
||||
rtol=1e-9, atol=1e-7)
|
||||
if __name__ == "__main__":
|
||||
unittest.main()
|
||||
68
common/transformations/tests/test_orientation.py
Executable file
68
common/transformations/tests/test_orientation.py
Executable file
@@ -0,0 +1,68 @@
|
||||
#!/usr/bin/env python3
|
||||
|
||||
import numpy as np
|
||||
import unittest
|
||||
|
||||
from openpilot.common.transformations.orientation import euler2quat, quat2euler, euler2rot, rot2euler, \
|
||||
rot2quat, quat2rot, \
|
||||
ned_euler_from_ecef
|
||||
|
||||
eulers = np.array([[ 1.46520501, 2.78688383, 2.92780854],
|
||||
[ 4.86909526, 3.60618161, 4.30648981],
|
||||
[ 3.72175965, 2.68763705, 5.43895988],
|
||||
[ 5.92306687, 5.69573614, 0.81100357],
|
||||
[ 0.67838374, 5.02402037, 2.47106426]])
|
||||
|
||||
quats = np.array([[ 0.66855182, -0.71500939, 0.19539353, 0.06017818],
|
||||
[ 0.43163717, 0.70013301, 0.28209145, 0.49389021],
|
||||
[ 0.44121991, -0.08252646, 0.34257534, 0.82532207],
|
||||
[ 0.88578382, -0.04515356, -0.32936046, 0.32383617],
|
||||
[ 0.06578165, 0.61282835, 0.07126891, 0.78424163]])
|
||||
|
||||
ecef_positions = np.array([[-2711076.55270557, -4259167.14692758, 3884579.87669935],
|
||||
[ 2068042.69652729, -5273435.40316622, 2927004.89190746],
|
||||
[-2160412.60461669, -4932588.89873832, 3406542.29652851],
|
||||
[-1458247.92550567, 5983060.87496612, 1654984.6099885 ],
|
||||
[ 4167239.10867871, 4064301.90363223, 2602234.6065749 ]])
|
||||
|
||||
ned_eulers = np.array([[ 0.46806039, -0.4881889 , 1.65697808],
|
||||
[-2.14525969, -0.36533066, 0.73813479],
|
||||
[-1.39523364, -0.58540761, -1.77376356],
|
||||
[-1.84220435, 0.61828016, -1.03310421],
|
||||
[ 2.50450101, 0.36304151, 0.33136365]])
|
||||
|
||||
|
||||
class TestOrientation(unittest.TestCase):
|
||||
def test_quat_euler(self):
|
||||
for i, eul in enumerate(eulers):
|
||||
np.testing.assert_allclose(quats[i], euler2quat(eul), rtol=1e-7)
|
||||
np.testing.assert_allclose(quats[i], euler2quat(quat2euler(quats[i])), rtol=1e-6)
|
||||
for i, eul in enumerate(eulers):
|
||||
np.testing.assert_allclose(quats[i], euler2quat(list(eul)), rtol=1e-7)
|
||||
np.testing.assert_allclose(quats[i], euler2quat(quat2euler(list(quats[i]))), rtol=1e-6)
|
||||
np.testing.assert_allclose(quats, euler2quat(eulers), rtol=1e-7)
|
||||
np.testing.assert_allclose(quats, euler2quat(quat2euler(quats)), rtol=1e-6)
|
||||
|
||||
def test_rot_euler(self):
|
||||
for eul in eulers:
|
||||
np.testing.assert_allclose(euler2quat(eul), euler2quat(rot2euler(euler2rot(eul))), rtol=1e-7)
|
||||
for eul in eulers:
|
||||
np.testing.assert_allclose(euler2quat(eul), euler2quat(rot2euler(euler2rot(list(eul)))), rtol=1e-7)
|
||||
np.testing.assert_allclose(euler2quat(eulers), euler2quat(rot2euler(euler2rot(eulers))), rtol=1e-7)
|
||||
|
||||
def test_rot_quat(self):
|
||||
for quat in quats:
|
||||
np.testing.assert_allclose(quat, rot2quat(quat2rot(quat)), rtol=1e-7)
|
||||
for quat in quats:
|
||||
np.testing.assert_allclose(quat, rot2quat(quat2rot(list(quat))), rtol=1e-7)
|
||||
np.testing.assert_allclose(quats, rot2quat(quat2rot(quats)), rtol=1e-7)
|
||||
|
||||
def test_euler_ned(self):
|
||||
for i in range(len(eulers)):
|
||||
np.testing.assert_allclose(ned_eulers[i], ned_euler_from_ecef(ecef_positions[i], eulers[i]), rtol=1e-7)
|
||||
#np.testing.assert_allclose(eulers[i], ecef_euler_from_ned(ecef_positions[i], ned_eulers[i]), rtol=1e-7)
|
||||
# np.testing.assert_allclose(ned_eulers, ned_euler_from_ecef(ecef_positions, eulers), rtol=1e-7)
|
||||
|
||||
|
||||
if __name__ == "__main__":
|
||||
unittest.main()
|
||||
72
common/transformations/transformations.pxd
Normal file
72
common/transformations/transformations.pxd
Normal file
@@ -0,0 +1,72 @@
|
||||
#cython: language_level=3
|
||||
from libcpp cimport bool
|
||||
|
||||
cdef extern from "orientation.cc":
|
||||
pass
|
||||
|
||||
cdef extern from "orientation.hpp":
|
||||
cdef cppclass Quaternion "Eigen::Quaterniond":
|
||||
Quaternion()
|
||||
Quaternion(double, double, double, double)
|
||||
double w()
|
||||
double x()
|
||||
double y()
|
||||
double z()
|
||||
|
||||
cdef cppclass Vector3 "Eigen::Vector3d":
|
||||
Vector3()
|
||||
Vector3(double, double, double)
|
||||
double operator()(int)
|
||||
|
||||
cdef cppclass Matrix3 "Eigen::Matrix3d":
|
||||
Matrix3()
|
||||
Matrix3(double*)
|
||||
|
||||
double operator()(int, int)
|
||||
|
||||
Quaternion euler2quat(Vector3)
|
||||
Vector3 quat2euler(Quaternion)
|
||||
Matrix3 quat2rot(Quaternion)
|
||||
Quaternion rot2quat(Matrix3)
|
||||
Vector3 rot2euler(Matrix3)
|
||||
Matrix3 euler2rot(Vector3)
|
||||
Matrix3 rot_matrix(double, double, double)
|
||||
Vector3 ecef_euler_from_ned(ECEF, Vector3)
|
||||
Vector3 ned_euler_from_ecef(ECEF, Vector3)
|
||||
|
||||
|
||||
cdef extern from "coordinates.cc":
|
||||
cdef struct ECEF:
|
||||
double x
|
||||
double y
|
||||
double z
|
||||
|
||||
cdef struct NED:
|
||||
double n
|
||||
double e
|
||||
double d
|
||||
|
||||
cdef struct Geodetic:
|
||||
double lat
|
||||
double lon
|
||||
double alt
|
||||
bool radians
|
||||
|
||||
ECEF geodetic2ecef(Geodetic)
|
||||
Geodetic ecef2geodetic(ECEF)
|
||||
|
||||
cdef cppclass LocalCoord_c "LocalCoord":
|
||||
Matrix3 ned2ecef_matrix
|
||||
Matrix3 ecef2ned_matrix
|
||||
|
||||
LocalCoord_c(Geodetic, ECEF)
|
||||
LocalCoord_c(Geodetic)
|
||||
LocalCoord_c(ECEF)
|
||||
|
||||
NED ecef2ned(ECEF)
|
||||
ECEF ned2ecef(NED)
|
||||
NED geodetic2ned(Geodetic)
|
||||
Geodetic ned2geodetic(NED)
|
||||
|
||||
cdef extern from "coordinates.hpp":
|
||||
pass
|
||||
174
common/transformations/transformations.pyx
Normal file
174
common/transformations/transformations.pyx
Normal file
@@ -0,0 +1,174 @@
|
||||
# distutils: language = c++
|
||||
# cython: language_level = 3
|
||||
from openpilot.common.transformations.transformations cimport Matrix3, Vector3, Quaternion
|
||||
from openpilot.common.transformations.transformations cimport ECEF, NED, Geodetic
|
||||
|
||||
from openpilot.common.transformations.transformations cimport euler2quat as euler2quat_c
|
||||
from openpilot.common.transformations.transformations cimport quat2euler as quat2euler_c
|
||||
from openpilot.common.transformations.transformations cimport quat2rot as quat2rot_c
|
||||
from openpilot.common.transformations.transformations cimport rot2quat as rot2quat_c
|
||||
from openpilot.common.transformations.transformations cimport euler2rot as euler2rot_c
|
||||
from openpilot.common.transformations.transformations cimport rot2euler as rot2euler_c
|
||||
from openpilot.common.transformations.transformations cimport rot_matrix as rot_matrix_c
|
||||
from openpilot.common.transformations.transformations cimport ecef_euler_from_ned as ecef_euler_from_ned_c
|
||||
from openpilot.common.transformations.transformations cimport ned_euler_from_ecef as ned_euler_from_ecef_c
|
||||
from openpilot.common.transformations.transformations cimport geodetic2ecef as geodetic2ecef_c
|
||||
from openpilot.common.transformations.transformations cimport ecef2geodetic as ecef2geodetic_c
|
||||
from openpilot.common.transformations.transformations cimport LocalCoord_c
|
||||
|
||||
|
||||
import cython
|
||||
import numpy as np
|
||||
cimport numpy as np
|
||||
|
||||
cdef np.ndarray[double, ndim=2] matrix2numpy(Matrix3 m):
|
||||
return np.array([
|
||||
[m(0, 0), m(0, 1), m(0, 2)],
|
||||
[m(1, 0), m(1, 1), m(1, 2)],
|
||||
[m(2, 0), m(2, 1), m(2, 2)],
|
||||
])
|
||||
|
||||
cdef Matrix3 numpy2matrix(np.ndarray[double, ndim=2, mode="fortran"] m):
|
||||
assert m.shape[0] == 3
|
||||
assert m.shape[1] == 3
|
||||
return Matrix3(<double*>m.data)
|
||||
|
||||
cdef ECEF list2ecef(ecef):
|
||||
cdef ECEF e;
|
||||
e.x = ecef[0]
|
||||
e.y = ecef[1]
|
||||
e.z = ecef[2]
|
||||
return e
|
||||
|
||||
cdef NED list2ned(ned):
|
||||
cdef NED n;
|
||||
n.n = ned[0]
|
||||
n.e = ned[1]
|
||||
n.d = ned[2]
|
||||
return n
|
||||
|
||||
cdef Geodetic list2geodetic(geodetic):
|
||||
cdef Geodetic g
|
||||
g.lat = geodetic[0]
|
||||
g.lon = geodetic[1]
|
||||
g.alt = geodetic[2]
|
||||
return g
|
||||
|
||||
def euler2quat_single(euler):
|
||||
cdef Vector3 e = Vector3(euler[0], euler[1], euler[2])
|
||||
cdef Quaternion q = euler2quat_c(e)
|
||||
return [q.w(), q.x(), q.y(), q.z()]
|
||||
|
||||
def quat2euler_single(quat):
|
||||
cdef Quaternion q = Quaternion(quat[0], quat[1], quat[2], quat[3])
|
||||
cdef Vector3 e = quat2euler_c(q);
|
||||
return [e(0), e(1), e(2)]
|
||||
|
||||
def quat2rot_single(quat):
|
||||
cdef Quaternion q = Quaternion(quat[0], quat[1], quat[2], quat[3])
|
||||
cdef Matrix3 r = quat2rot_c(q)
|
||||
return matrix2numpy(r)
|
||||
|
||||
def rot2quat_single(rot):
|
||||
cdef Matrix3 r = numpy2matrix(np.asfortranarray(rot, dtype=np.double))
|
||||
cdef Quaternion q = rot2quat_c(r)
|
||||
return [q.w(), q.x(), q.y(), q.z()]
|
||||
|
||||
def euler2rot_single(euler):
|
||||
cdef Vector3 e = Vector3(euler[0], euler[1], euler[2])
|
||||
cdef Matrix3 r = euler2rot_c(e)
|
||||
return matrix2numpy(r)
|
||||
|
||||
def rot2euler_single(rot):
|
||||
cdef Matrix3 r = numpy2matrix(np.asfortranarray(rot, dtype=np.double))
|
||||
cdef Vector3 e = rot2euler_c(r)
|
||||
return [e(0), e(1), e(2)]
|
||||
|
||||
def rot_matrix(roll, pitch, yaw):
|
||||
return matrix2numpy(rot_matrix_c(roll, pitch, yaw))
|
||||
|
||||
def ecef_euler_from_ned_single(ecef_init, ned_pose):
|
||||
cdef ECEF init = list2ecef(ecef_init)
|
||||
cdef Vector3 pose = Vector3(ned_pose[0], ned_pose[1], ned_pose[2])
|
||||
|
||||
cdef Vector3 e = ecef_euler_from_ned_c(init, pose)
|
||||
return [e(0), e(1), e(2)]
|
||||
|
||||
def ned_euler_from_ecef_single(ecef_init, ecef_pose):
|
||||
cdef ECEF init = list2ecef(ecef_init)
|
||||
cdef Vector3 pose = Vector3(ecef_pose[0], ecef_pose[1], ecef_pose[2])
|
||||
|
||||
cdef Vector3 e = ned_euler_from_ecef_c(init, pose)
|
||||
return [e(0), e(1), e(2)]
|
||||
|
||||
def geodetic2ecef_single(geodetic):
|
||||
cdef Geodetic g = list2geodetic(geodetic)
|
||||
cdef ECEF e = geodetic2ecef_c(g)
|
||||
return [e.x, e.y, e.z]
|
||||
|
||||
def ecef2geodetic_single(ecef):
|
||||
cdef ECEF e = list2ecef(ecef)
|
||||
cdef Geodetic g = ecef2geodetic_c(e)
|
||||
return [g.lat, g.lon, g.alt]
|
||||
|
||||
|
||||
cdef class LocalCoord:
|
||||
cdef LocalCoord_c * lc
|
||||
|
||||
def __init__(self, geodetic=None, ecef=None):
|
||||
assert (geodetic is not None) or (ecef is not None)
|
||||
if geodetic is not None:
|
||||
self.lc = new LocalCoord_c(list2geodetic(geodetic))
|
||||
elif ecef is not None:
|
||||
self.lc = new LocalCoord_c(list2ecef(ecef))
|
||||
|
||||
@property
|
||||
def ned2ecef_matrix(self):
|
||||
return matrix2numpy(self.lc.ned2ecef_matrix)
|
||||
|
||||
@property
|
||||
def ecef2ned_matrix(self):
|
||||
return matrix2numpy(self.lc.ecef2ned_matrix)
|
||||
|
||||
@property
|
||||
def ned_from_ecef_matrix(self):
|
||||
return self.ecef2ned_matrix
|
||||
|
||||
@property
|
||||
def ecef_from_ned_matrix(self):
|
||||
return self.ned2ecef_matrix
|
||||
|
||||
@classmethod
|
||||
def from_geodetic(cls, geodetic):
|
||||
return cls(geodetic=geodetic)
|
||||
|
||||
@classmethod
|
||||
def from_ecef(cls, ecef):
|
||||
return cls(ecef=ecef)
|
||||
|
||||
def ecef2ned_single(self, ecef):
|
||||
assert self.lc
|
||||
cdef ECEF e = list2ecef(ecef)
|
||||
cdef NED n = self.lc.ecef2ned(e)
|
||||
return [n.n, n.e, n.d]
|
||||
|
||||
def ned2ecef_single(self, ned):
|
||||
assert self.lc
|
||||
cdef NED n = list2ned(ned)
|
||||
cdef ECEF e = self.lc.ned2ecef(n)
|
||||
return [e.x, e.y, e.z]
|
||||
|
||||
def geodetic2ned_single(self, geodetic):
|
||||
assert self.lc
|
||||
cdef Geodetic g = list2geodetic(geodetic)
|
||||
cdef NED n = self.lc.geodetic2ned(g)
|
||||
return [n.n, n.e, n.d]
|
||||
|
||||
def ned2geodetic_single(self, ned):
|
||||
assert self.lc
|
||||
cdef NED n = list2ned(ned)
|
||||
cdef Geodetic g = self.lc.ned2geodetic(n)
|
||||
return [g.lat, g.lon, g.alt]
|
||||
|
||||
def __dealloc__(self):
|
||||
del self.lc
|
||||
BIN
common/transformations/transformations.so
Executable file
BIN
common/transformations/transformations.so
Executable file
Binary file not shown.
208
common/util.h
Normal file
208
common/util.h
Normal file
@@ -0,0 +1,208 @@
|
||||
#pragma once
|
||||
|
||||
#include <fcntl.h>
|
||||
#include <sys/stat.h>
|
||||
#include <unistd.h>
|
||||
#include <zmq.h>
|
||||
|
||||
#include <algorithm>
|
||||
#include <atomic>
|
||||
#include <chrono>
|
||||
#include <csignal>
|
||||
#include <ctime>
|
||||
#include <map>
|
||||
#include <memory>
|
||||
#include <mutex>
|
||||
#include <string>
|
||||
#include <thread>
|
||||
#include <vector>
|
||||
|
||||
// keep trying if x gets interrupted by a signal
|
||||
#define HANDLE_EINTR(x) \
|
||||
({ \
|
||||
decltype(x) ret_; \
|
||||
int try_cnt = 0; \
|
||||
do { \
|
||||
ret_ = (x); \
|
||||
} while (ret_ == -1 && errno == EINTR && try_cnt++ < 100); \
|
||||
ret_; \
|
||||
})
|
||||
|
||||
#ifndef sighandler_t
|
||||
typedef void (*sighandler_t)(int sig);
|
||||
#endif
|
||||
|
||||
const double MILE_TO_KM = 1.609344;
|
||||
const double KM_TO_MILE = 1. / MILE_TO_KM;
|
||||
const double MS_TO_KPH = 3.6;
|
||||
const double MS_TO_MPH = MS_TO_KPH * KM_TO_MILE;
|
||||
const double METER_TO_MILE = KM_TO_MILE / 1000.0;
|
||||
const double METER_TO_FOOT = 3.28084;
|
||||
|
||||
namespace util {
|
||||
|
||||
void set_thread_name(const char* name);
|
||||
int set_realtime_priority(int level);
|
||||
int set_core_affinity(std::vector<int> cores);
|
||||
int set_file_descriptor_limit(uint64_t limit);
|
||||
|
||||
// ***** Time helpers *****
|
||||
struct tm get_time();
|
||||
bool time_valid(struct tm sys_time);
|
||||
|
||||
// ***** math helpers *****
|
||||
|
||||
// map x from [a1, a2] to [b1, b2]
|
||||
template <typename T>
|
||||
T map_val(T x, T a1, T a2, T b1, T b2) {
|
||||
x = std::clamp(x, a1, a2);
|
||||
T ra = a2 - a1;
|
||||
T rb = b2 - b1;
|
||||
return (x - a1) * rb / ra + b1;
|
||||
}
|
||||
|
||||
// ***** string helpers *****
|
||||
|
||||
template <typename... Args>
|
||||
std::string string_format(const std::string& format, Args... args) {
|
||||
size_t size = snprintf(nullptr, 0, format.c_str(), args...) + 1;
|
||||
std::unique_ptr<char[]> buf(new char[size]);
|
||||
snprintf(buf.get(), size, format.c_str(), args...);
|
||||
return std::string(buf.get(), buf.get() + size - 1);
|
||||
}
|
||||
|
||||
std::string getenv(const char* key, std::string default_val = "");
|
||||
int getenv(const char* key, int default_val);
|
||||
float getenv(const char* key, float default_val);
|
||||
|
||||
std::string hexdump(const uint8_t* in, const size_t size);
|
||||
std::string dir_name(std::string const& path);
|
||||
bool starts_with(const std::string &s1, const std::string &s2);
|
||||
bool ends_with(const std::string &s1, const std::string &s2);
|
||||
|
||||
// ***** random helpers *****
|
||||
int random_int(int min, int max);
|
||||
std::string random_string(std::string::size_type length);
|
||||
|
||||
// **** file helpers *****
|
||||
std::string read_file(const std::string& fn);
|
||||
std::map<std::string, std::string> read_files_in_dir(const std::string& path);
|
||||
int write_file(const char* path, const void* data, size_t size, int flags = O_WRONLY, mode_t mode = 0664);
|
||||
|
||||
FILE* safe_fopen(const char* filename, const char* mode);
|
||||
size_t safe_fwrite(const void * ptr, size_t size, size_t count, FILE * stream);
|
||||
int safe_fflush(FILE *stream);
|
||||
int safe_ioctl(int fd, unsigned long request, void *argp);
|
||||
|
||||
std::string readlink(const std::string& path);
|
||||
bool file_exists(const std::string& fn);
|
||||
bool create_directories(const std::string &dir, mode_t mode);
|
||||
|
||||
std::string check_output(const std::string& command);
|
||||
|
||||
inline void sleep_for(const int milliseconds) {
|
||||
if (milliseconds > 0) {
|
||||
std::this_thread::sleep_for(std::chrono::milliseconds(milliseconds));
|
||||
}
|
||||
}
|
||||
|
||||
} // namespace util
|
||||
|
||||
class ExitHandler {
|
||||
public:
|
||||
ExitHandler() {
|
||||
std::signal(SIGINT, (sighandler_t)set_do_exit);
|
||||
std::signal(SIGTERM, (sighandler_t)set_do_exit);
|
||||
|
||||
#ifndef __APPLE__
|
||||
std::signal(SIGPWR, (sighandler_t)set_do_exit);
|
||||
#endif
|
||||
}
|
||||
inline static std::atomic<bool> power_failure = false;
|
||||
inline static std::atomic<int> signal = 0;
|
||||
inline operator bool() { return do_exit; }
|
||||
inline ExitHandler& operator=(bool v) {
|
||||
signal = 0;
|
||||
do_exit = v;
|
||||
return *this;
|
||||
}
|
||||
private:
|
||||
static void set_do_exit(int sig) {
|
||||
#ifndef __APPLE__
|
||||
power_failure = (sig == SIGPWR);
|
||||
#endif
|
||||
signal = sig;
|
||||
do_exit = true;
|
||||
}
|
||||
inline static std::atomic<bool> do_exit = false;
|
||||
};
|
||||
|
||||
struct unique_fd {
|
||||
unique_fd(int fd = -1) : fd_(fd) {}
|
||||
unique_fd& operator=(unique_fd&& uf) {
|
||||
fd_ = uf.fd_;
|
||||
uf.fd_ = -1;
|
||||
return *this;
|
||||
}
|
||||
~unique_fd() {
|
||||
if (fd_ != -1) close(fd_);
|
||||
}
|
||||
operator int() const { return fd_; }
|
||||
int fd_;
|
||||
};
|
||||
|
||||
class FirstOrderFilter {
|
||||
public:
|
||||
FirstOrderFilter(float x0, float ts, float dt) {
|
||||
k_ = (dt / ts) / (1.0 + dt / ts);
|
||||
x_ = x0;
|
||||
}
|
||||
inline float update(float x) {
|
||||
x_ = (1. - k_) * x_ + k_ * x;
|
||||
return x_;
|
||||
}
|
||||
inline void reset(float x) { x_ = x; }
|
||||
inline float x(){ return x_; }
|
||||
|
||||
private:
|
||||
float x_, k_;
|
||||
};
|
||||
|
||||
template<typename T>
|
||||
void update_max_atomic(std::atomic<T>& max, T const& value) {
|
||||
T prev = max;
|
||||
while (prev < value && !max.compare_exchange_weak(prev, value)) {}
|
||||
}
|
||||
|
||||
class LogState {
|
||||
public:
|
||||
bool initialized = false;
|
||||
std::mutex lock;
|
||||
void *zctx = nullptr;
|
||||
void *sock = nullptr;
|
||||
int print_level;
|
||||
const char* endpoint;
|
||||
|
||||
LogState(const char* _endpoint) {
|
||||
endpoint = _endpoint;
|
||||
}
|
||||
|
||||
inline void initialize() {
|
||||
zctx = zmq_ctx_new();
|
||||
sock = zmq_socket(zctx, ZMQ_PUSH);
|
||||
|
||||
// Timeout on shutdown for messages to be received by the logging process
|
||||
int timeout = 100;
|
||||
zmq_setsockopt(sock, ZMQ_LINGER, &timeout, sizeof(timeout));
|
||||
|
||||
zmq_connect(sock, endpoint);
|
||||
initialized = true;
|
||||
}
|
||||
|
||||
~LogState() {
|
||||
if (initialized) {
|
||||
zmq_close(sock);
|
||||
zmq_ctx_destroy(zctx);
|
||||
}
|
||||
}
|
||||
};
|
||||
1
common/version.h
Normal file
1
common/version.h
Normal file
@@ -0,0 +1 @@
|
||||
#define COMMA_VERSION "2026.03.08"
|
||||
22
common/visionimg.h
Normal file
22
common/visionimg.h
Normal file
@@ -0,0 +1,22 @@
|
||||
#pragma once
|
||||
|
||||
#include "cereal/visionipc/visionbuf.h"
|
||||
|
||||
#ifdef QCOM
|
||||
#include <GLES3/gl3.h>
|
||||
|
||||
#include <EGL/egl.h>
|
||||
#define EGL_EGLEXT_PROTOTYPES
|
||||
#include <EGL/eglext.h>
|
||||
#undef Status
|
||||
|
||||
class EGLImageTexture {
|
||||
public:
|
||||
EGLImageTexture(const VisionBuf *buf);
|
||||
~EGLImageTexture();
|
||||
GLuint frame_tex = 0;
|
||||
|
||||
void *private_handle = nullptr;
|
||||
EGLImageKHR img_khr = 0;
|
||||
};
|
||||
#endif
|
||||
5
common/watchdog.h
Normal file
5
common/watchdog.h
Normal file
@@ -0,0 +1,5 @@
|
||||
#pragma once
|
||||
|
||||
#include <cstdint>
|
||||
|
||||
bool watchdog_kick(uint64_t ts);
|
||||
61
common/window.py
Normal file
61
common/window.py
Normal file
@@ -0,0 +1,61 @@
|
||||
import sys
|
||||
import pygame # pylint: disable=import-error
|
||||
import cv2 # pylint: disable=import-error
|
||||
|
||||
class Window:
|
||||
def __init__(self, w, h, caption="window", double=False, halve=False):
|
||||
self.w = w
|
||||
self.h = h
|
||||
pygame.display.init()
|
||||
pygame.display.set_caption(caption)
|
||||
self.double = double
|
||||
self.halve = halve
|
||||
if self.double:
|
||||
self.rw, self.rh = w*2, h*2
|
||||
elif self.halve:
|
||||
self.rw, self.rh = w//2, h//2
|
||||
else:
|
||||
self.rw, self.rh = w, h
|
||||
self.screen = pygame.display.set_mode((self.rw, self.rh))
|
||||
pygame.display.flip()
|
||||
|
||||
# hack for xmonad, it shrinks the window by 6 pixels after the display.flip
|
||||
if self.screen.get_width() != self.rw:
|
||||
self.screen = pygame.display.set_mode((self.rw+(self.rw-self.screen.get_width()), self.rh+(self.rh-self.screen.get_height())))
|
||||
pygame.display.flip()
|
||||
|
||||
def draw(self, out):
|
||||
pygame.event.pump()
|
||||
if self.double:
|
||||
out2 = cv2.resize(out, (self.w*2, self.h*2))
|
||||
pygame.surfarray.blit_array(self.screen, out2.swapaxes(0, 1))
|
||||
elif self.halve:
|
||||
out2 = cv2.resize(out, (self.w//2, self.h//2))
|
||||
pygame.surfarray.blit_array(self.screen, out2.swapaxes(0, 1))
|
||||
else:
|
||||
pygame.surfarray.blit_array(self.screen, out.swapaxes(0, 1))
|
||||
pygame.display.flip()
|
||||
|
||||
def getkey(self):
|
||||
while 1:
|
||||
event = pygame.event.wait()
|
||||
if event.type == pygame.QUIT:
|
||||
pygame.quit()
|
||||
sys.exit()
|
||||
if event.type == pygame.KEYDOWN:
|
||||
return event.key
|
||||
|
||||
def getclick(self):
|
||||
for event in pygame.event.get():
|
||||
if event.type == pygame.MOUSEBUTTONDOWN:
|
||||
mx, my = pygame.mouse.get_pos()
|
||||
return mx, my
|
||||
|
||||
if __name__ == "__main__":
|
||||
import numpy as np
|
||||
win = Window(200, 200, double=True)
|
||||
img: np.ndarray = np.zeros((200, 200, 3), np.uint8)
|
||||
while 1:
|
||||
print("draw")
|
||||
img += 1
|
||||
win.draw(img)
|
||||
46
common/xattr.py
Normal file
46
common/xattr.py
Normal file
@@ -0,0 +1,46 @@
|
||||
import os
|
||||
from cffi import FFI
|
||||
from typing import Any, List
|
||||
|
||||
# Workaround for the EON/termux build of Python having os.*xattr removed.
|
||||
ffi = FFI()
|
||||
ffi.cdef("""
|
||||
int setxattr(const char *path, const char *name, const void *value, size_t size, int flags);
|
||||
ssize_t getxattr(const char *path, const char *name, void *value, size_t size);
|
||||
ssize_t listxattr(const char *path, char *list, size_t size);
|
||||
int removexattr(const char *path, const char *name);
|
||||
""")
|
||||
libc = ffi.dlopen(None)
|
||||
|
||||
def setxattr(path, name, value, flags=0) -> None:
|
||||
path = path.encode()
|
||||
name = name.encode()
|
||||
if libc.setxattr(path, name, value, len(value), flags) == -1:
|
||||
raise OSError(ffi.errno, f"{os.strerror(ffi.errno)}: setxattr({path}, {name}, {value}, {flags})")
|
||||
|
||||
def getxattr(path, name, size=128):
|
||||
path = path.encode()
|
||||
name = name.encode()
|
||||
value = ffi.new(f"char[{size}]")
|
||||
l = libc.getxattr(path, name, value, size)
|
||||
if l == -1:
|
||||
# errno 61 means attribute hasn't been set
|
||||
if ffi.errno == 61:
|
||||
return None
|
||||
raise OSError(ffi.errno, f"{os.strerror(ffi.errno)}: getxattr({path}, {name}, {size})")
|
||||
return ffi.buffer(value)[:l]
|
||||
|
||||
def listxattr(path, size=128) -> List[Any]:
|
||||
path = path.encode()
|
||||
attrs = ffi.new(f"char[{size}]")
|
||||
l = libc.listxattr(path, attrs, size)
|
||||
if l == -1:
|
||||
raise OSError(ffi.errno, f"{os.strerror(ffi.errno)}: listxattr({path}, {size})")
|
||||
# attrs is b'\0' delimited values (so chop off trailing empty item)
|
||||
return [a.decode() for a in ffi.buffer(attrs)[:l].split(b"\0")[0:-1]]
|
||||
|
||||
def removexattr(path, name) -> None:
|
||||
path = path.encode()
|
||||
name = name.encode()
|
||||
if libc.removexattr(path, name) == -1:
|
||||
raise OSError(ffi.errno, f"{os.strerror(ffi.errno)}: removexattr({path}, {name})")
|
||||
Reference in New Issue
Block a user